Электрические Машины. Экзаменационные билеты с ответами (2019 год)
Оглавление
Билет 1 5
Вопрос 1 Роль электрических машин в современной технике. Общие вопросы
электромеханического преобразования энергии. Новые серии АМ. 5
Вопрос 2 Получение кругового вращающего поля при трехфазной обмотке.
Принцип действия АД. 7
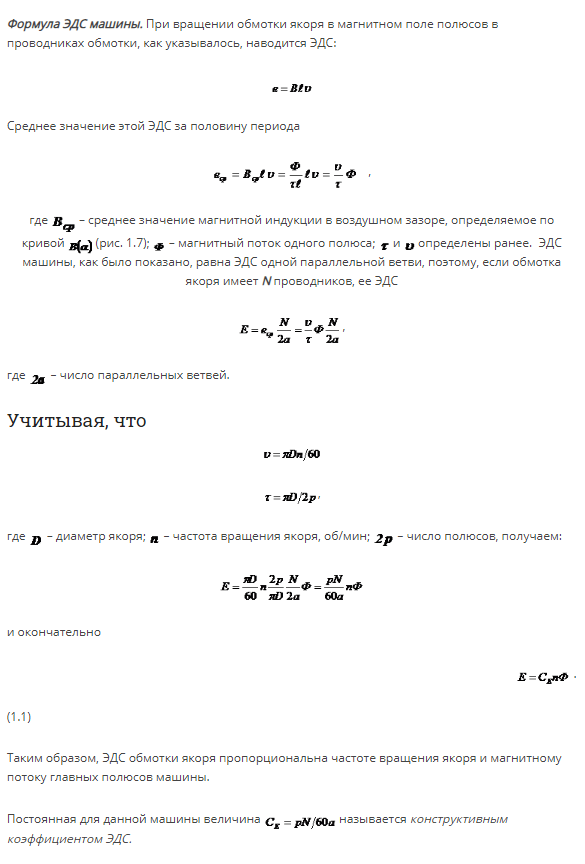
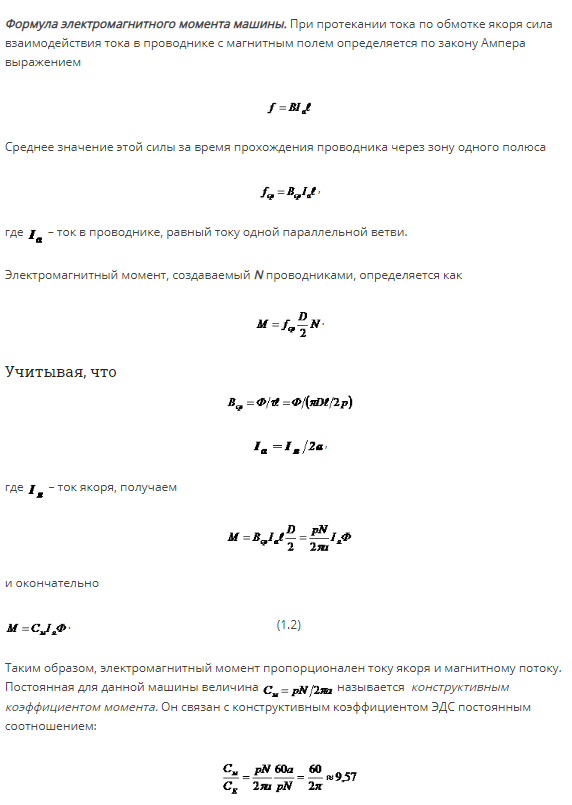
Вопрос 3 Образование Э.Д.С. в обмотках. Электромагнитный момент машины
постоянного тока. 8
Билет 2 10
Вопрос 1 Обмотки машин переменного тока, ЭДС в обмотке, обмоточный
коэффициент 10
Вопрос 2 Энергетическая диаграмма АД. Уравнения рабочего процесса в АМ.
Приведение величин ротора к обмотке статора. 12
Вопрос 3 Характеристика холостого хода 16
Билет 3 17
Вопрос 1 Вращающееся магнитное поле в электрических машинах и условия
его создания. Обмотки машин переменного тока. Э.Д.С. обмотки, обмоточный
коэффициент. 17
Вопрос 2 Конструкция АД. 22
Вопрос 3 Магнитное поле машины при холостом ходе. Поле рассеяния.
Принцип расчета магнитной цепи. 25
Билет 4 29
Вопрос 1 Высшие гармоники МДС и поля. Составляющая магнитного поля и
индуктивные сопротивления обмоток. 29
Вопрос 2 Векторная диаграмма АД. Схемы замещения АМ. 31
Вопрос 3 Обобщенная электрическая машина. Комплексные уравнения
электрических машин 38
Билет 5 43
Вопрос 1 Электромагнитные силы и моменты в ЭМ. 43
Вопрос 2 Условия устойчивости работы АМ. 45
Вопрос 3 Магнитное поле якоря. Расчет магнитной цепи машины. 46
Билет 6 50
Вопрос 1 Электромагнитные силы и моменты в ЭМ. 50
Вопрос 2 Электромагнитные моменты от высших гармоник магнитного поля. 50
Вопрос 3 Влияние поля якоря на величину магнитного потока и ЭДС машины.
51
Билет 7 55
Вопрос 1 Преобразование переменного тока в постоянный и постоянного в
переменный 55
Вопрос 2 Г- образная схема замещения АД. 56
Вопрос 3 Влияние поперечного поля якоря на потенциальную кривую
коллектора 57
Билет 8 59
Вопрос 1 Законы: электромагнитной индукции, Кирхгофа, полного тока,Ома
для магнитной цепи. 59
Вопрос 2 Определение трансформаторов. Классификация, применение,
особенности конструкции. 60
Вопрос 3 Круговой огонь на колеекторе. 63
Билет 9 65
Вопрос 1 Определение трансформаторов. Классификация, применение,
особенности конструкции 65
Вопрос 2 Рабочие характеристики АД 66
Вопрос 3 Искрение на коллекторе. Способы улучшения коммутации 67
Билет 10 69
Вопрос 1 Принцип действия трансформаторов 69
Вопрос 2 Круговая диаграмма АД. Определение рабочих характеристик по
круговой диаграмме 70
Вопрос 3 Генераторы постоянного тока 76
Билет 11 78
Вопрос 1 Основные уравнения и векторная диаграмма приведенного
трансформатора. 78
Вопрос 2 Пуск трехфазных АД. Способы пуска с улучшенными пусковыми
характеристиками. 82
Вопрос 3 Механические электромеханические и рабочие характеристики
двигателей с различными способами возбуждения. 88
Билет 12 95
Вопрос 1 Характеристики трансформаторов: внешняя, КПД 95
Вопрос 2 Двигатель с двойной клеткой на роторе 97
Вопрос 3 Двигатели постоянного тока. Преобразование электрической
энергии в механическую. 98
Билет 13 101
Вопрос 1 Параллельная работа трансформаторов 101
Вопрос 2 Образование ЭДС в обмотках. Электромагнитный момент машины
постоянного тока(1.3 тот же вопрос но разобран женей) 101
Вопрос 3 Обмотки машин постоянного тока.(23.3 такой же вопрос) 105
Билет 14 110
Вопрос 1 Переходные процессы в трансформаторах. 110
Вопрос 2 Угловые характеристики СМ. 112
Вопрос 3 АД в режимах генератора, электромагнитного тормоза. 114
Билет 15 116
Вопрос 1 Переходные процессы в трансформаторах. 116
Вопрос 2 Магнитные поля и основные параметры СМ 118
Вопрос 3 Асинхронный преобразователь частоты 122
Билет 16 124
Вопрос 1 Включение ненагруженного трансформатора. Перенапряжение в
трансформаторах 124
Вопрос 2 Синхронные микромашины 125
Вопрос 3 Холостой ход синхронных генераторов 126
Билет 17 128
Вопрос 1 Включение ненагруженного трансформатора. Перенапряжение в
трансформаторах (как 16.1) 128
Вопрос 2 СГ несимметричные внезапные кз. Действия токов в кз. 130
Вопрос 3 Специальные типы СМ. 131
Билет 18(фулл 2 билет) 133
Вопрос 1 Обмотки машин переменного тока. Э.Д.С. в обмотке обмоточный
коэффициент. 133
Вопрос 2 Энергетическая диаграмма АД. Уравнение рабочего процесса в АМ.
134
Вопрос 3 Характеристика ХХ. 136
Билет 19 137
Вопрос 1 Линейные, дуговые, электрические машины 137
Вопрос 2 Условия устойчивости работы электродвигателя. ПТ 138
Вопрос 3 Опыт холостого хода и короткого замыкания трансформатора 140
Билет 20 143
Вопрос 1 Работа машины постоянного тока под нагрузкой. 143
Вопрос 2 Конденсаторные АД. 144
Вопрос 3 Определение рабочих характеристик АД по круговой диаграмме. 146
Билет 21(Попов его потерял) 149
Билет 22 149
Вопрос 1 Классы коммутации. 149
Вопрос 2 Виды обмоток АД, виды пазов статора и ротора. 150
Вопрос 3 Шаговый двигатель(импульсный, реактивный) 152
Билет 23 155
Вопрос 1 Коммутация машин. 155
Вопрос 2 Классификация генераторов по способу возбуждения 156
Вопрос 3 Обмотки машин постоянного тока 162
Билет 24 165
Вопрос 1 СД с постоянными магнитами. 165
Вопрос 2 АД при неподвижном роторе. Замещение вращающегося ротора
эквивалентным неподвижным. 167
Вопрос 3 Гистерезисный СД. 172
Билет 25 175
Вопрос 1 МДС вращающегося ротора АД 175
Вопрос 2 Специальные трансформаторы. 176
Вопрос 3 Построение круговой диаграммы по опытам ХХ и КЗ. 179
Билет 26 182
Вопрос 1 Специальные машины постоянного тока 182
Вопрос 2 Специальные трансформаторы 184
Вопрос 3 Регулирование частоты вращения двигателя постоянного тока 186
Билет 27 188
Вопрос 1 Векторные диаграммы АМ в генераторе 188
Вопрос 2 Вращающиеся трансформаторы 188
Вопрос 3 Вентильные двигатели 189
Билет 28 191
Вопрос 1 Формула Клосса 191
Вопрос 2 Индукционный фазорегулятор 191
Вопрос 3 Асинхронные исполнительные двигатели 192
Билет 29 194
Вопрос 1 Линейные асинхронные двигатели 194
Вопрос 2 Основные уравнения и векторная диаграмма приведённого
трансформатора 195
Вопрос 3 Векторные диаграммы АМ в режиме противовключения(молитесь) 196
Билет 1
Вопрос 1 Роль электрических машин в современной технике. Общие вопросы
электромеханического преобразования энергии. Новые серии АМ.
1)ЭМ используются во всех сферах человеческой жизни начиная с момента
получения электрической энергии на ГЭС, ТЭЦ, ветряных электростанциях и
других электростанциях где механическая энергия преобразуется в
электрическую .И заканчивая потребителем как предприятий промышленности
: станки , конвейерные ленты , электровозы и многое другое оборудование,
так и в повседневной жизни холодильник, автомобиль , стиральная машина,
электробритва и другие приборы без которых мы не представляем своё
комфортное существование.
Электрические машины разделяют по назначению на два основных вида:
электрические генераторы и электрические двигатели. Генераторы
предназначены для выработки электрической энергии, а электродвигатели -
для приведения в движение колесных пар локомотивов, вращения валов
вентиляторов, компрессоров и т. п. В электрических машинах происходит
процесс преобразования энергии. Генераторы преобразуют механическую
энергию в электрическую. Это означает, что для работы генератора надо
вращать его вал каким-либо двигателем. Электрические двигатели,
наоборот, преобразуют электрическую энергию в механическую. Поэтому для
работы двигателя его надо соединить проводами с источником электрической
энергии. Принцип действия любой электрической машины основан на
использовании явлений электромагнитной индукции и возникновения
электромагнитных сил при взаимодействии проводников с током и магнитного
поля. Эти явления имеют место при работе как генератора, так и
электродвигателя.
Электродвигатели выпускаются сериями, а для массового применения –
едиными сериями. Для единых серий характерен высокий уровень унификации
деталей и узлов, максимальная взаимозаменяемость. Для этого используют
одни и те же штампы. Например, для того, чтобы пластины роторов и
статоров использовались в машинах разной мощности, наращивание мощности
достигается изменением длины пакетов пластин. Выпускаются специальные
серии – крановые, металлургические, судовые, тяговые и т.д.
Двигатели серии 4А.
Двигатели серии 4А предназначены для широкого применения, в нефтяной
промышленности они применяются на станках качалках.
Двигатели серии АИР
Двигатели серии АИР разрабатывались в рамках программы «Интерэлектро».
Отличия двигателей серии АИР от серии 4А:
1. Применяются высокопрочные алюминиевые сплавы, пластмассы и более
современная система вентиляции.
2. Применяются подшипники с улучшенной характеристикой виброустойчивости.
3. По сравнению с двигателями серии 4А снижена температура на 10 – 12
оС, что обеспечило в тех же габаритах увеличение мощности
электродвигателя.
Высоковольтные асинхронные двигатели, с короткозамкнутым ротором
Двигатели серии АН2 применяются для привода насосов и вентиляторов.
Машины постоянного тока серии 2П
Это машины общепромышленного применения. В основу типизации положена
высота оси вращения h = 90 – 315 мм, nн = 750 – 4000 об/мин.
Предусмотрено 11 габаритов. Каждый габарит может иметь две длинны:
среднею (М) и длинную (L).
Крановая и металлургическая серия асинхронных двигателей
Марки: 4MTF (с фазным ротором), 4 MTKF (с короткозамкнутым ротором).
Это двигатели повторно-кратковременного режима работы. Применяются на
кранах с тяжелыми условиями работы. Основной режим работы ПВ 40%.
Крановая серия двигателей постоянного тока, серия Д.
Двигатели серии Д могут иметь последовательное, смешанное, параллельное
возбуждение.
Вопрос 2 Получение кругового вращающего поля при трехфазной обмотке. Принцип действия АД.
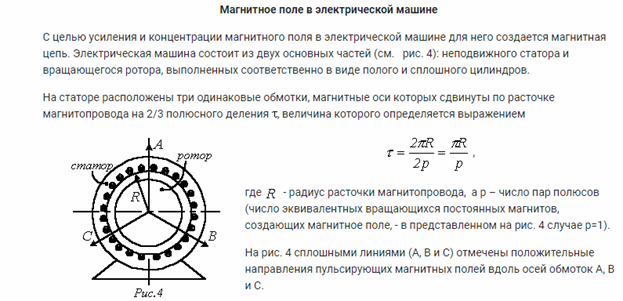
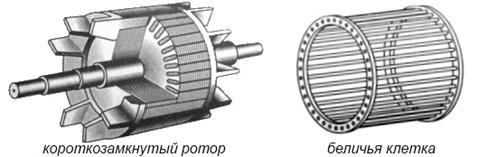
Устройство асинхронного двигателя соответствует изображению на рис. 4. Вращающееся магнитное поле, создаваемое расположенными на статоре обмотками с током, взаимодействует с токами ротора, приводя его во вращение. Наибольшее распространение в настоящее время получил асинхронный двигатель с короткозамкнутым ротором ввиду своей простоты и надежности. В пазах ротора такой машины размещены токонесущие медные или алюминиевые стержни. Концы всех стержней с обоих торцов ротора соединены медными или алюминиевыми же кольцами, которые замыкают стержни накоротко. Отсюда и произошло такое название ротора.
В короткозамкнутой обмотке ротора под действием ЭДС, вызываемой вращающимся полем статора, возникают вихревые токи. Взаимодействуя с полем, они вовлекают ротор во вращение со скоростью, принципиально меньшей скорости вращения поля. Отсюда название двигателя - асинхронный.
Вопрос 3 Образование Э.Д.С. в обмотках. Электромагнитный момент машины постоянного тока.
(ЭДС) — скалярная физическая величина, характеризующая работу сторонних сил (то есть любых сил, кроме электростатических и диссипативных) действующих в квазистационарных цепях постоянного или переменного тока.
Электромагнитный момент – момент, возникающий на валу электродвигателя при протекании по его обмоткам электрического тока.
Билет 2
Вопрос 1 Обмотки машин переменного тока, ЭДС в обмотке, обмоточный коэффициент
Обмотки с током должны выполнять две основные функции: обеспечивать
требуемую для работы машины э. д. с. и создавать магнитное поле, необходимое
для преобразования энергии.
Обмотки
машин переменного тока можно разделить на три группы:

1 2
1) катушечные;
2) стержневые;
3) специальные;
К специальным обмоткам относятся:
а) короткозамкнутая обмотка в виде беличьей клетки;
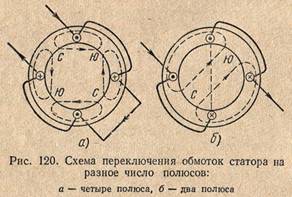
б) обмотка асинхронного двигателя с переключением на разные числа полюсов и т. д.

Специальные а б
Кроме вышеуказанного деления, обмотки отличаются по ряду других признаков, а именно:
1) по характеру исполнения — ручные, шаблонные и полушаблонные;
2) по расположению в пазу — однослойные и двухслойные;
3) по числу пазов на полюс и фазу — обмотки с целым числом q пазов на полюс и фазу и обмотки с дробным числом q.
Совокупность катушек,
присоединенных к внешней цепи, называется фазной обмоткой.
Обмотка характеризуется количеством пазов на
полюс и фазу д = которое может быть как целым, так и дробным в зависимости от
соотношения количества пазов Z, количества полюсов 2р и количества фаз т.
Обмотка статора (и ротора) может быть однофазной
или многофазной, состоящей из нескольких фазных обмоток. Наибольшее
распространение получили симметричные трехфазные обмотки в соответствии с
применяемой в промышленности трехфазной системой переменного тока.
Однофазный Многофазная
Электродвижущая сила в обмотке электрической машины индуктируется только при условии изменения потокосцепления магнитного поля с витками катушки, что находит отражение в известном соотношении:
![]()
отражающем закон электромагнитной индукции. Потокосцепление может изменяться под действием различных причин.
При вращении витка в магнитном поле или при перемещении магнитного поля относительно неподвижного витка в нем индуктируется ЭДС, которую называют ЭДС вращения. При изменении во времени потока, сцепленного с неподвижным витком, в нем индуктируется так называемая трансформаторная ЭДС. Во всех случаях величина и характер изменения индуктируемой ЭДС определяется величиной и характером изменения потокосцепления и также параметрами витка.
Обмоточный коэффициент kоб учитывает уменьшение ЭДС pacпределенной обмотки по сравнению с ЭДС обмотки с тем же числом витков, но имеющих диаметральный шаг и сосредоточенных в одной катушке на каждом полюсе. Для любой обмотки kоб может быть найден по векторной диаграмме ЭДС проводников (звезде пазовых ЭДС) как отношение геометрической суммы векторов ЭДС проводников, последовательно соединенных в фазу обмотки (ЭДС фазы), к алгебраической сумме ЭДС этих же проводников:
 (3.3)
(3.3)
где епр — ЭДС эффективного проводника; n — число последовательных эффективных проводников обмотки.
Вопрос 2 Энергетическая диаграмма АД. Уравнения рабочего процесса в АМ. Приведение величин ротора к обмотке статора.
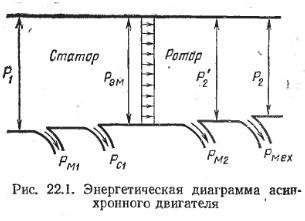
По факту энергетическая даиграмма это диаграмма потерь
За время dt электрическая энергия P1dt, потребляемая асинхронным двигателем из сети, преобразовывается в механическую P2dt. При работе машины неизбежно происходит потеря преобразуемой ею энергии и, следовательно, потребляемая двигателем мощность Р1 будет больше полезной Р2, развиваемой на валу двигателя.
Процесс преобразования энергии и потери, происходящие при работе двигателя, можно иллюстрировать энергетической диаграммой (рис. 22.1). Потребляемая двигателем мощность из сети P1 = m1U1l1 cosφ1 частично расходуется на покрытие потерь в обмотках статора Рm1 =т1I12r1 и в стали сердечника статора Рс1 на гистерезис и вихревые токи. Оставшаяся часть мощности Pэм = P1—Рm1—Рс1, называемая электромагнитной, передается ротору через воздушный зазор вращающимся магнитным полем. Энергия, полученная ротором, преобразуется в механическую и частично расходуется на покрытие потерь в роторе. На диаграмме показано, что электромагнитная мощность, поступающая на ротор, может быть представлена в виде суммы двух мощностей: Рэм=P’2 +Pm2
Так как сердечник ротора при работе двигателя перемагничивается с малой частотой pns/6O=f2=Sf1 то потери в стали ротора будут также малы (на энергетической диаграмме они не показаны).
Не вся энергия, преобразованная машиной в механическую (P’2dt) является полезной энергией P2dt, так как часть ее расходуется на покрытие механических потерь Pмехdt от трения в подшипниках и о воздух вращающихся частей машины. Таким образом, мощность, развиваемая вращающимся ротором, P’2=P2+Pмех
Максимального значения КПД двигателя достигает при нагрузке, близкой к номннальной. Двигатели малой и средней мощности имеют номинальный КПД в пределах 70...90%, двигатели большей мощности имеют КПД примерно 94...96%.
Уравнения рабочего процесса в асинхронной машине
Процессы, протекающие в асинхронной машине с эквивалентным неподвижным ротором, описываются системой уравнений, подобной системе уравнений для трансформатора (см. гл.3).
В асинхронной машине первичной обмоткой является обмотка статора, а вторичной – обмотка ротора.
Уравнение напряжения обмотки статора
![]() , (2.8)
, (2.8)
где U1 — напряжение, подводимое к обмотке статора; Е1— ЭДС, наводимая в обмотке статора; Z1=r1+jx1 — комплексное сопротивление обмотки статора, состоящее из активного сопротивления обмотки статора r1и ее индуктивного сопротивления рассеяния x1; I1 — ток в обмотке статора.
Уравнения напряжения эквивалентного неподвижного ротора
![]() , (2.9)
, (2.9)
где Z2э = r2/s+jx2.; Z2 = r2 + jx2 – полное сопротивление обмотки неподвижного ротора.
Уравнение МДС
 . (2.10)
. (2.10)
С учётом ( ) уравнение (2.10) запишем в виде

После преобразований получим уравнение для токов
 , (2.11)
, (2.11)
где  .
.
Электродвижущие силы Е1и Е2 индуцируются в обмотках асинхронной машины основным потоком Ф, являющимся потоком взаимной индукции. Этот поток создается результирующей МДС F12. Результирующей МДС F12 пропорционален ток I12, который согласно (2.11) можно считать составляющей тока статора I1:
 (2.12)
(2.12)
Ток I12 является током возбуждения и носит название намагничивающего тока.
При изменении нагрузки от холостого хода до номинальной падение напряжения в цепи статора мало и приложенное напряжение U1 можно принять равным:
U1 ≈E1=4,44f1w1 kw1 Ф,
откуда следует, что если U1=const, то поток Ф и создающий его ток I12 практически тоже должны оставаться постоянными.
Для практических расчетов можно принять, что ток I12 равен току при реальном холостом ходе машины, когда отсутствует тормозной момент на валу (s≈0), т. е. I12 ≈ I0.
Приведение параметров обмотки ротора к обмотке статора
Для совместного анализа процессов в статоре и роторе АД параметры обмотки ротора приводят к обмотке статора. При этом обмотку ротора с числом фаз т2, обмоточным коэффициентом коб2 и числом витков фазы w2 заменяют обмоткой с параметрами т1,коб1 и wx. При такой замене у приведенного ротора мощности и углы фазовых сдвигов векторов токов, напряжений и ЭДС должны остаться такими же, что и до приведения.
Пересчет реальных параметров обмотки ротора на приведенные ведется по следующим формулам: — приведенная ЭДС ротора при 5 = 1
![]()
где ke=El / Е2= fcoei^i / (K)62w2) — коэффициент трансформации напряжения в асинхронной машине при неподвижном роторе; приведенный ток ротора
![]()
где Iq = т^/Соб! / (m2w2ko62) = тгке /т2 — коэффициент трансформации тока асинхронной машины.
В АД коэффициент ке * кь так как в общем случае число фаз в обмотке статора т1 и в обмотке ротора т2 неодинаково.
Активное и индуктивное приведенные сопротивления обмотки ротора:

Для короткозамкнутой обмотки ротора каждый стержень обмотки следует рассматривать как фазную обмотку. Поэтому число витков одной фазы обмотки ротора w2 =0,5; обмоточный коэффициент обмотки ротора к^^ = 1, а число фаз т2 равно числу стержней.
Вопрос 3 Характеристика холостого хода
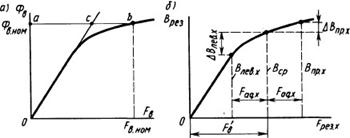
Характеристика холостого хода
представляет собой зависимость напряжения генератора U от тока возбуждения при
постоянном числе оборотов п в токе якоря = 0: U = f(IB). Характеристика
холостого хода имеет две ветви — восходящую и нисходящую (рис. 299). Остаточный
магнетизм полюсов и ярма при отсутствии возбуждения обусловливает некоторое
напряжение, обычно равное 2-3% UH.
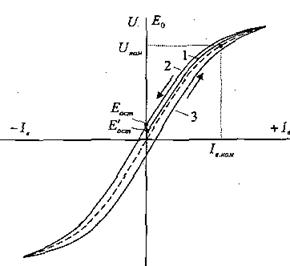
Рис. 299. Характеристика холостого хода.
Характеристика холостого хода генератора независимого возбуждения проходит через все квадранты, поскольку в таком генераторе можно изменить направление тока в обмотке возбуждения (кривые 2 и 3). Следует отметить, что в третьем квадранте ветвь 2 является восходящей, а 3 - нисходящей. Кривая 2 совместно с кривой 3 образуют гистерезиснуго петлю, определяющую свойства магнитной системы генератора.
За расчетную характеристику холостого хода принимают среднюю линию
между ветвями, проходящую через начало координат (показано пунктиром). Точка
номинального напряжения обычно лежит на колене расчетной кривой.
Билет 3
Вопрос 1 Вращающееся магнитное поле в электрических машинах и условия его создания. Обмотки машин переменного тока. Э.Д.С. обмотки, обмоточный коэффициент.
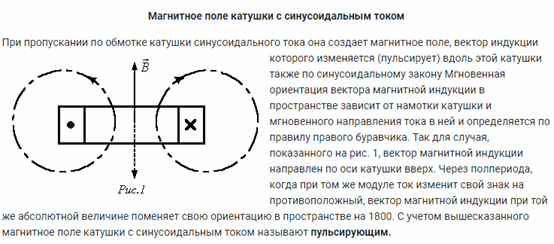
Вращающееся магнитное поле. Обычно под вращающимся магнитным полем понимается магнитное поле, вектор магнитной индукции которого, не изменяясь по модулю, вращается с постоянной угловой скоростью.
Также вращающимися магнитными полями называют и магнитные поля вращающихся постоянных магнитов.
Принцип получения вращающегося магнитного поля.
В основе работы асинхронных двигателей лежит вращающееся магнитное поле, создаваемое МДС (магнитодвижущая сила) обмоток статора.
Вращающееся поле создается в генераторах, в которых при вращении обмотки возбуждения в трехфазных обмотках статора наводятся напряжения и токи, сдвинутые во времени на электрический угол 120°. Вращающееся магнитное поле может быть получено также при вращении обмотки, в которой протекает постоянный ток, или при вращении постоянного магнита.
Основным магнитным потоком называется поток в воздушном зазоре, приходящийся на один главный полюс машины. Значение магнитного потока определяется значением индуцируемой в обмотке якоря эдс (электродвижущая сила.)
В воздушном зазоре имеются спектры гармоник, вращающихся в противоположные стороны с различными частотами. В частном случае, когда высшие гармоники отсутствуют, при равномерной частоте вращения поля и неизменной амплитуде вращающееся поле называют круговым или синусоидальным
Чтобы в зазоре укладывалось целое число волн магнитного поля и нс (намагничивающая сила) возникало отраженных волн, необходимо выбирать определенное число пазов:
![]()
где m - количество фаз, q — число пазов на полюс и фазу.
1.
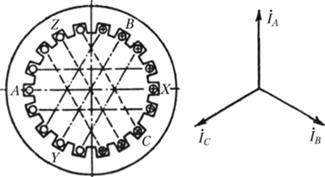
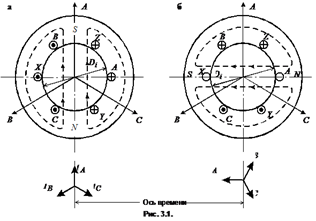
Рис. 1.46. Схема и векторная диаграмма трехфазной обмотки (р = 1, q = 3)
Для обмотки, показанной па рис. 1.46, число пазов равно 18, так как m = 3,р = 1, q = 3.
Сходственные проводники каждого витка фазы расположены друг от друга на расстоянии полюсного деления

где Da — внутренний диаметр статора.
Для рассматриваемой обмотки полюсное деление составляет половину окружности. Поэтому шаг обмотки у равен полюсному делению m. Обмотки с у = m называются обмотками с диаметральным шагом. Двойному полюсному делению в двухполюсной машине 2m соответствует электрический угол 360°. Начала фаз А, В, С сдвинуты относительно друг друга на электрический угол 120°, что в двухполюсной машине составляет 1/з окружности.
При изменении фазы токов, что соответствует повороту векторной диаграммы токов, кривые распределения токов по окружности статора и магнитного потока в воздушном зазоре будут вращаться в направлении следования фаз. Таким образом, в зазоре электрической машины создается вращающееся магнитное поле.
В двухполюсной машине частота вращения магнитного поля равна частоте напряжения и тока статора.
При увеличении числа полюсов полюсное деление составляет часть окружности: для 2р = 4 оно равно 1/4, для 2р = 6 оно равно 1/6 и т.д.
Частота вращения поля равна

При этом линейная окружная скорость поля

При частоте 50 Гц получаются стандартные частоты вращения поля, указанные в
табл. 1.2.
Магнитное поле вращается в направлении, определяемом токами фаз А, В, С обмотки,
к которой подводятся напряжения, соответствующие векторной диаграмме трехфазной
системы А, В, С. Для изменения направления вращения поля достаточно изменить
порядок следования фаз — подключение выводов обмотки к сети.
Таблица 1.2
|
р |
1 |
2 |
3 |
4 |
5 |
6 |
8 |
10 |
30 |
50 |
|
Щ, об/мин |
3000 |
1500 |
1000 |
750 |
600 |
500 |
375 |
300 |
100 |
60 |
где слагаемыми являются н.с. воздушного зазора, зубцов якоря, спинки якоря, полюсов, ярма



2 –
касательная к начальной части кривой 1
![]()
Обмотки состоят из секций (катушек). Секция может быть одновитковой (состоять из одного витка) и многовитковой (иметь несколько витков) (рис. 1.3). Части секции, укладываемые в пазы, называются пазовыми или активными, а располагаемые вне паза – лобовыми.
В машинах переменного тока выделяют 3 основные типа обмотки:
1) катушечные,
2) стержневые,
3) специальные.
Катушечные изготавливают из изолированного медного или алюминиевого провода круглого поперечного сечения, стержневые и специальные – из шин прямоугольного и поперечного сечения.
Ширина секции определяется шагом обмотки у.
Чтобы ЭДС проводников двух активных сторон секции суммировались, активные стороны должны располагаться под полюсами разной полярности. Шаг у должен быть примерно равен полюсному делению y ≈ τп.
Зубцовое (пазовое) деление — это длина дуги по внутренней окружности статора между серединами соседних зубцов или пазов:
tz=πD/Z,
где D – диаметр внутренней окружности статора;
Z – общее число зубцов на статоре.
Если шаг равен полюсному делению: у = τп = Z/(2р), то обмотка называется обмоткой с диаметральным шагом, а если у < τп – то с укороченным шагом.
Обмотки с укороченным шагом позволяют получить форму кривых индуцируемой ЭДС и поля, близкие к синусоидальным. Обычно у ≈ 0,8τп. Однако укорочение шага приводит к уменьшению эдс: катушки обмотки пронизываются не всем потоком, а только его частью.
Действующее значение эдс:
![]()
Ко – обмоточный коэффициент, учитывающий уменьшение эдс
W – число витков одной фазы обмотки
В зависимости от конструктивного
расположения обмотки в пазах они могут быть одно- и двухслойными.Представлены
две катушки одной фазы однослойной обмотки. Катушки состоят из активных
проводников, отстоящих друг от друга на расстоянии шага обмотки.
В двухслойных обмотках активный проводник, расположенный в верхнем слое паза,
соединяется с проводником, расположенным в нижнем слое.


Трёхфазная обмотка статора состоит из трех идентичных частей – фаз.
Индуцируемые в фазах ЭДС должны быть равны, но сдвинуты во времени на
электрический угол, равный 120°. На поперечном разрезе двухполюсной машины
показаны обмотки трех фаз (q=2), начала которых (Ан, Вн, Сн ) имеют сдвиг на
120°.
Вопрос 2 Конструкция АД.
Асинхронный двигатель - это асинхронная машина, предназначенная для
преобразования электрической энергии переменного тока в механическую
энергию. У асинхронных двигателей частота вращения магнитного поля статора
всегда больше частоты вращения ротора.
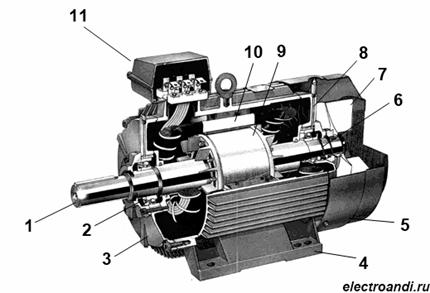
На рисунке: 1 - вал, 2,6 - подшипники, 3,8 - подшипниковые щиты, 4 - лапы, 5 - кожух вентилятора, 7 - крыльчатка вентилятора, 9 - короткозамкнутый ротор, 10 - статор, 11 - коробка выводов.
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется "беличьей клеткой". В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от
обмотки статора. В большинстве случаев концы обмоток фазного ротора
соединяются в звезду, а свободные концы подводятся к контактным кольцам. С
помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно
вводить добавочный резистор. Это нужно для того, чтобы можно было изменять
активное сопротивление в цепи ротора, потому что это способствует уменьшению
больших пусковых токов.

Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
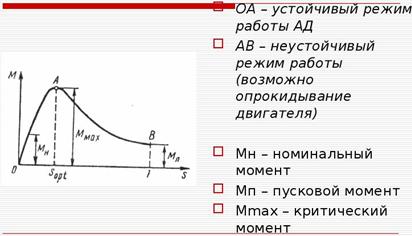
Скольжение s - это
величина, которая показывает, насколько синхронная частота n1 магнитного
поля статора больше, чем частота вращения ротора n2, в процентном
соотношении.
В начальный момент времени скольжение равно единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр - критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме - 1 -

Вопрос 3 Магнитное поле машины при холостом ходе. Поле рассеяния. Принцип
расчета магнитной цепи.
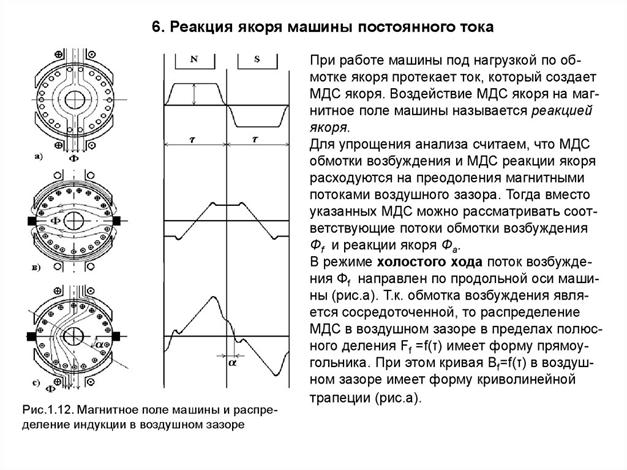
Режим холостого хода.
В этом режиме магнитный поток Фв при симметричном воздушном зазоре между
якорем и сердечником главного полюса распределяется симметрично относительно
продольной оси машины.
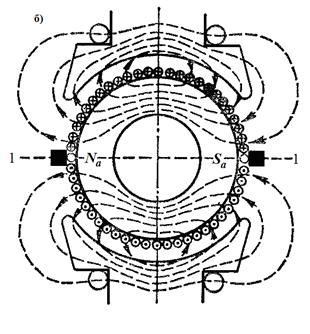
Реакция якоря. При работе машины под нагрузкой по обмотке якоря проходит
ток, вследствие чего возникает МДС якоря. Воздействие МДС якоря на магнитное
поле машины называют реакцией якоря.
При работе под нагрузкой магнитный поток, созданный МДС якоря в двухполюсной
машине при установке щеток на геометрической нейтрали, направлен по
поперечной оси машины, поэтому магнитное поле якоря называют поперечным. В
результате действия реакции якоря симметричное распределение магнитного поля
машины относительно оси главных полюсов искажается и результирующее поле
оказывается смещенным к одному из краев каждого главного полюса
Магнитная характеристика машины постоянного тока (а) и график для определения размагничивающего действия поперечного поля реакции якоря (б)
В генераторах физическая нейтраль смещается по направлению
Реакция якоря при сдвиге щеток с геометрической нейтрали.
Продольная МДС Fad создает продольный поток Φαd, который может сильно увеличивать или уменьшать результирующий магнитный поток машины Фрез в зависимости от того, совпадает МДС Fad с FB или направлена против нее.
Направление определяется тем, в какую сторону сдвинуты щетки. Если щетки сдвинуты по направлению вращения генератора или против направления вращения электродвигателя, то продольная МДС Fad
размагничивает машину. При сдвиге щеток в обратном направлении МДС Fad подмагничивает машину. Свойство продольной МДС Fad изменять результирующий магнитный поток Фрез используется в некоторых специальных машинах, например в электромашинных усилителях с поперечным полем. Поперечная МДС Faq создает магнитный поток Фаq; она действует на поток Фрез так же, как и при расположении щеток на геометрической нейтрали.
Поток в полюсе состоит из 2 частей. Одна из них поступает в воздушный зазор и формирует поле машины, эта часть является рабочим потоком. Другая часть сцеплена только с витками обмотки возбуждения и косвенно участвует в создании электромагнитного момента. Эту часть потока называют потоком рассеяния.
Он зависит от
проводимости межполюсного окна ![]() и от МДС
и от МДС ![]() и возрастает с увеличением насыщения магнитной
цепи.
и возрастает с увеличением насыщения магнитной
цепи.
![]()
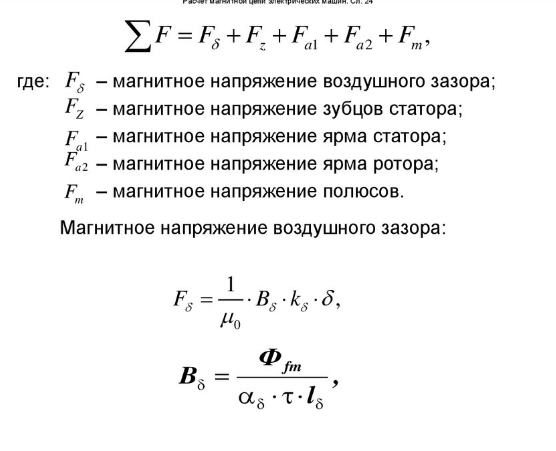
Расчет магнитных цепей
H – напряженность магнитного поля, А/м (Ампер/метр);
Ф – поток индукции магнитного поля, Вб (Вебер);
F = I·w – магнитодвижущая сила (м. д. с.), А (Ампер);
Первый закон Кирхгофа для магнитных цепей гласит: алгебраическая
сумма магнитных потоков в узле магнитной цепи равна нулю.
Закон полного тока применяется к замкнутому контуру, образованному средними
магнитными линиями магнитной цепи и имеет вид:
∫H→⋅dl→=∑I⋅w,∫H→⋅dl→=∑I⋅w,
где
∫H→⋅dl→=∑H⋅l∫H→⋅dl→=∑H⋅l – падение магнитного напряжения UM = H·l в контуре;
F=∑I⋅wF=∑I⋅w – магнитодвижущая сила контура (м. д. с.).
Второй закон Кирхгофа для магнитных цепей сформулируем следующим образом: алгебраическая сумма магнитных напряжений UM = H·l в замкнутом контуре магнитной цепи (∑UM=∑H⋅l)(∑UM=∑H⋅l) равна алгебраической сумме магнитодвижущих сил F = I·w в том же контуре (∑F=∑I⋅w)(∑F=∑I⋅w):
∑UM=∑F∑UM=∑F
или
∑H⋅l=∑I⋅w.∑H⋅l=∑I⋅w.
Задачи на расчет магнитной цепи могут быть двух видов: прямая задача на расчет магнитной цепи – когда задан поток и требуется рассчитать магнитодвижущую силу (м. д. с.) и обратная задача на расчет магнитной цепи – когда по заданной м. д. с. требуется рассчитать магнитный поток.
В обоих случаях должны быть известны геометрические размеры магнитной цепи и заданы кривые намагничивания ее материалов.
Алгоритм прямой задачи расчета неразветвленной магнитной цепи
Дана конфигурация и геометрические размеры неразветвленной магнитной цепи, кривая (или кривые) намагничивания магнитного материала и магнитный поток или индукция магнитного поля в каком-либо сечении. Требуется найти магнитодвижущую силу, ток или число витков намагничивающей обмотки.
Расчет проводим в соответствии с алгоритмом:
1. Разбиваем магнитную цепь на однородные (из одного магнитного материала) участки постоянного сечения и определяем длины lk и площади поперечного сечения Sk участков. Длины участков (в метрах) берем по средней силовой линии.
2. Исходя из постоянства потока вдоль всей неразветвленной магнитной цепи, по заданному магнитному потоку Ф и сечениям Sk участков находим магнитные индукции на каждом участке:
Bk=ФSk.Bk=ФSk.
Если задана магнитная индукция на каком-либо участке магнитной цепи, то магнитный поток вдоль всей неразветвленной цепи
Ф = Bk·Sk.
3. По найденным магнитным индукциям Bk участков цепи и кривой намагничивания материала k-го участка цепи (например, рис. 2.1, табл. 2.1) определяем напряженности поля Hk на каждом участке магнитной цепи.
Напряженность поля в воздушном зазоре находим по формуле
Hвозд=Bвоздμ0=Bвозд4π⋅10−7.Hвозд=Bвоздμ0=Bвозд4π⋅10−7.
4. Подсчитаем сумму падений магнитных напряжений UMk = Hk·lk вдоль всей магнитной цепи
∑UMk=∑Hk⋅lk∑UMk=∑Hk⋅lk
и на основании второго закона Кирхгофа для магнитной цепи приравниваем сумме магнитодвижущих сил Fk = Ik·wk вдоль всей магнитной цепи:
∑Hk⋅lk=∑Ik⋅wk.∑Hk⋅lk=∑Ik⋅wk.
Основным допущением при расчете является то, что магнитный поток вдоль всей неразветвленной магнитной цепи полагаем неизменным.
Билет 4
Вопрос 1 Высшие гармоники МДС и поля. Составляющая магнитного поля и индуктивные сопротивления обмоток.
Гармоники – это синусоидальные волны суммирующиеся с фундаментальной.
Вращающееся поле кроме основной (первой) гармонической индукции может содержать в той или иной мере выраженные высшие гармонические.
Вращающееся поле, содержащее высшие гармонические, называется несинусоидальным вращающимся полем
Полюсное деление МДС высших пространственных гармоник обратно пропорционально номеру гармоники: фv = ф /v.
Поэтому пространственная периодичность этих гармоник растет пропорционально номеру гармоники (см. рис. 4.1).
Учитывая изложенное, запишем уравнение МДС третьей гармоники фазных обмоток:
f3A = F3A sin α1t cos3ß ;
f3B = F3B sin(α1t - 120 )cos3(ß - 120 ) = F3A sin (α1t -120 )cos3ß ;
f3C = F3C sin(α1t- 240 )cos3ß (ß - 240 ) = F3A sin (α1t - 240 ) cos3ß.
откуда МДС третьей гармоники трехфазной обмотки
f3 = f3A + f3B + f3C = 0, (4-17)
т. е. результирующая МДС третьей гармоники в трехфазной обмотке статора при симметричной нагрузке фаз равна нулю. Это распространяется также и на высшие гармоники, кратные трем (9, 15 и др.). МДС высших гармоник оставшихся номеров (5, 7 и др.) ослабляются распределением обмотки в пазах, укорочением шага катушек и скосом пазов.
МДС высших гармоник многофазной обмотки статора - вращающиеся. При этом частота их вращения nv в раз меньше частоты вращения МДС основной гармоники:
nv = n1/. (4.18)
Направление вращения этих МДС зависит от номера гармоники: МДС гармоник порядка 6х + 1 вращаются согласно с МДС основной гармоники -- прямовращающиеся МДС, а МДС порядка 6х - 1 вращаются встречно МДС основной гармоники -- обратновращающиеся МДС (здесь х = 1, 2, 3,...).
Магнитное поле* создаваемое током обмотки, подразделяется на три пространственные зоны: 1) поле воздушного зазора, 2) поле пазов и 3) поде лобовых частей обмотки.
Полезное действие машины переменного тока, за редким исключением некоторых машин специального назначения, основано на действии магнитного поля основной гармоники воздушного зазора. Это поле поэтому является главным, или рабочим, а поля пазов и лобовых частей — полями рассеяния. К последним относятся также поля высших гармоник воздушного зазора, которые называются полями рассеяния воздушного зазора или полями дифференциального рассеяния.
Второе название обусловлено тем, что эти поля представляют собой разность между полным полем воздушного зазора и его основной гармоникой.
Таким образом, магнитное поле рассеяния состоит из трех главных частей: 1) пазового, 2) лобового и 3) поля рассеяния воздушного зазора, или дифференциального.
Главные индуктивные сопротивления обмоток переменного тока
Вращающиеся гармоники магнитного поля обмотки статора асинхронной машины, перемещаясь относительно этой обмотки, индуктируют в ней э. д. с. самоиндукции, частота которых при равномерном воздушном зазоре равна частоте тока в данной обмотке. Во вращающейся машине высшие гармоники поля не создают э. д. с. взаимной индукции основной частоты и их следует, отнести к полям рассеяния. Из-за наличия пазов на статоре и роторе при вращении ротора возникают также дополнительные гармоники, поля, которые индуктируют в обмотках э. д. с. различных, в том числе и относительно высоких, частот. При нормальной конструкции машины эти э. д. с. не имеют существенного значения и ниже не рассматриваются.
В электрической машине переменного тока при этом каждой гармонике поля v соответствуют определенные значения индуктивных сопротивлений само- и взаимной индукции xv.
Работа машин переменного тока основана на действии основных гармоник поля.
I Индуктивные сопротивления, соответствующие этим гармоникам, называют главными.
Величины главных индуктивных сопротивлений (Величины, относящиеся к статору и ротору, обозначим соответственно индексами 1 и 2.):




Вопрос 2 Векторная диаграмма АД. Схемы замещения АМ.

Для построения векторной диаграммы асинхронного двигателя необходимо чтобы параметры цепи ротора были приведены к цепи статора. Это достигается заменой числа витков одной фазной обмотки w2, с числом фаз m2 и обмоточным коэффициентом kоб2 на w1, m1, kоб1.
Энергетические параметры должны быть пересчитаны правильно, для того чтобы сохранить энергетические соотношения в двигателе.
ЭДС приведенной вторичной обмотки

Коэффициент трансформации токов

Отсюда приведенный ток вторичной обмотки

В асинхронном двигателе с короткозамкнутым ротором числа фаз m1 и m2 не равны, потому что каждый стержень короткозамкнутой обмотки рассматривается как отдельная фаза, число витков такой обмотки w2=0.5, а число фаз равно числу стержней m2=Z2. Обмоточный коэффициент для такой обмотки kоб2=1. Исходя из этого ke≠ki, в отличие от трансформатора.
Активное и индуктивное сопротивления вторичной обмотки

Угол сдвига фаз между E2’ и I2’

Уравнения токов, напряжений статора и ротора

На основании этих уравнений выполняется построение векторной диаграммы асинхронного двигателя
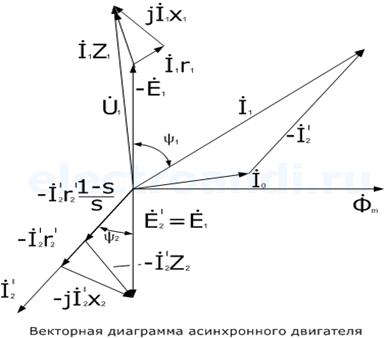
Построение векторной диаграммы начинается с вектора основного магнитного потока Ф. Затем откладываются вектора E2’ и E1, которые отстают от вектора Ф на 90⁰. Затем зная угол сдвига фаз ψ2 между I2’ и E2’, строят вектор I2’. Вектор I0 опережает Ф на угол δ, а вектор I1 находят как векторную сумму I0 и -I2’. Вектор U1 строим, добавляя к вектору –E1 падение напряжения I1r1 параллельно вектору I1, затем откладываем jI1x1 и получаем вектор I1Z1, который складываем с –E1 и в итоге получаем U1.
Так как асинхронный двигатель в данном случае можно рассматривать как трансформатор, работающий на активную нагрузку, то вектор –I2’r2’(1-s)/s откладываем под тем же углом, что и I2', затем прибавляем к нему –I2’r2’ и –jI2’x2, получаем вектор –I2’Z2.
Схемы замещения
Упрощенная картина магнитных потоков работающего асинхронного электродвигателя позволяет представить его в виде эквивалентной схемы:

Электромагнитная связь первичной и вторичной цепи осуществляется потоком взаимоиндукции Ф, индуктирующим в роторной обмотке ЭДС Е2S. Сопротивление индуктивное первичной цепи Х1 обусловлено наличием потока рассеивания, связанного только с этой цепью. Аналогично сопротивления Х2 обусловлено потоком рассеивания Ф25.
Частота тока ротора будет определяться скоростью его вращения относительно скорости вращения магнитного поля статора, то есть зависеть от скольжения и будет равна f2 = f1S.
Ток вторичной цепи при вращающемся роторе:
Также выражения для I2 может иметь:
Вместо
вращающегося ротора можно рассматривать неподвижный, в котором будет
индуцироваться ЭДС Е2. При этом индуктивное сопротивление будет равно
Х2, а активное возрастет на величину ![]() так
как
так
как ![]() . При
этом I1 останется прежним по фазе и величине, что не повлияет на
потребляемую из сети мощность. Поскольку I1 и I2 не
изменятся, то потери в первичных и вторичных цепях также не изменятся,
соответственно мощность тоже не будет изменяться, а мощность развиваемая
двигателем при вращении, будет равна мощности, потребляемой в добавочном
сопротивлении
. При
этом I1 останется прежним по фазе и величине, что не повлияет на
потребляемую из сети мощность. Поскольку I1 и I2 не
изменятся, то потери в первичных и вторичных цепях также не изменятся,
соответственно мощность тоже не будет изменяться, а мощность развиваемая
двигателем при вращении, будет равна мощности, потребляемой в добавочном
сопротивлении ![]() . Таким образом, эквивалентная
схема замещения асинхронной машины может быть заменена схемой замещения с
добавочным сопротивлением rд во вторичной цепи:
. Таким образом, эквивалентная
схема замещения асинхронной машины может быть заменена схемой замещения с
добавочным сопротивлением rд во вторичной цепи:

Математическое описание процессов электромеханического преобразования энергии в обобщенной машине
Обобщенная электрическая машина может быть представлена схемой приведенной на
рис. Две обмотки статора размещены в ортогональной системе координат ![]() , неподвижной
относительно статора, а две обмотки ротора – в ортогональной системе координат d,
q, неподвижной относительно ротора.
, неподвижной
относительно статора, а две обмотки ротора – в ортогональной системе координат d,
q, неподвижной относительно ротора.
Для
координат и параметров обобщенной машины будем использовать следующую систему
индексов. Индексами 1 и 2 будем обозначены координаты и параметры, относящиеся
соответственно к статору и ротору; индексы ![]() , d,
q определяют принадлежность координат к соответствующей оси машины.
, d,
q определяют принадлежность координат к соответствующей оси машины.
Динамика обобщенной электрической машины описывается четырьмя уравнениями электрического равновесия в цепях ее обмоток (выраженные через потокосцепления) и уравнением электромеханического преобразования энергии.
![]()

где ![]() – активное
сопротивление одной фазы статора (ротора),
– активное
сопротивление одной фазы статора (ротора), ![]() -
потокосцепления соответствующих индексам обмоток.
-
потокосцепления соответствующих индексам обмоток.
Уравнения (2.2) однотипны и их можно записать в компактной обобщающей форме: ![]() где индекс i принимает
значения
где индекс i принимает
значения ![]() 2d,
2q, соответствующие индексам обмоток.
2d,
2q, соответствующие индексам обмоток.
Потокосцепления обмоток в общем виде определяются результирующим действием токов всех обмоток машины:

![]()
Здесь для собственных и взаимных индуктивностей обмоток принято одинаковое обозначение с
подстрочным индексом, первая часть которого i= ![]() 2d,
2q, указывает, в какой
2d,
2q, указывает, в какой
обмотке наводится ЭДС, а вторая j= ![]() 2d, 2q, -
током какой обмотки она создается.
2d, 2q, -
током какой обмотки она создается.
Обобщенная форма записи этой системы
При работе машины взаимное положение обмоток статора и ротора изменяется, поэтому собственные
и
взаимные индуктивности обмоток в общем случае являются функцией угла поворота
ротора ![]() .
.
Взаимные индуктивности обмоток статора и ротора проходят полный цикл изменений
при повороте ротора на угол ![]() ,поэтому можно записать
,поэтому можно записать
С учетом
выражения (2.5) уравнения электрического равновесия можно представить в
обобщенной форме записи ![]() где
где ![]() определяются
формулами (2.6).
определяются
формулами (2.6).
В
результате взаимодействия токов, протекающих по обмоткам обобщенной машины, на
ее роторе создается электромагнитный момент М, который может быть определен с
помощью известных соотношений : ![]()
С
помощью выражения (2.5) электромагнитный момент может быть выражен через токи
обмоток: ![]()
 Уравнения
электрического равновесия (2.7) в сочетании с уравнением электромагнитного
момента (2.8) представляют собой математическое описание динамического процесса
преобразования энергии, которое в дальнейшем будет конкретизировано для наиболее
используемых разновидностей электродвигателей. В обобщенной форме это описание
принимает следующий вид: Уравнение электромагнитного момента можно упростить,
подставив в (2.9) выражения для собственных и взаимных индуктивностей обмоток
(2.6):
Уравнения
электрического равновесия (2.7) в сочетании с уравнением электромагнитного
момента (2.8) представляют собой математическое описание динамического процесса
преобразования энергии, которое в дальнейшем будет конкретизировано для наиболее
используемых разновидностей электродвигателей. В обобщенной форме это описание
принимает следующий вид: Уравнение электромагнитного момента можно упростить,
подставив в (2.9) выражения для собственных и взаимных индуктивностей обмоток
(2.6): ![]()
Так как ![]() зависят от
угла
зависят от
угла ![]() , а, следовательно, и от
времени t, уравнение (2.7) после дифференцирования по времени преобразуется к
виду:
, а, следовательно, и от
времени t, уравнение (2.7) после дифференцирования по времени преобразуется к
виду: ![]() где
где ![]() - угловая
скорость вала двигателя.
- угловая
скорость вала двигателя.
Первый член каждого уравнения (2.12) представляет собой падение напряжения на
активном сопротивлении цепи данной обмотки, второй – результирующую ЭДС
самоиндукции и взаимной индукции ![]() ,
вызванную изменениями токов в обмотках, а третий член отражает взаимодействие
механической и электрической частей электропривода и представляет собой
результирующую ЭДС, наведенную в обмотке в результате механического движения
ротора машины.
,
вызванную изменениями токов в обмотках, а третий член отражает взаимодействие
механической и электрической частей электропривода и представляет собой
результирующую ЭДС, наведенную в обмотке в результате механического движения
ротора машины.
Следовательно, математическое описание процессов преобразования энергии в обобщенной электрической машине в общем виде имеет следующий вид:

Билет 5
Вопрос 1 Электромагнитные силы и моменты в ЭМ.
Сила:


Момент:


Вопрос 2 Условия устойчивости работы АМ.



Вопрос 3 Магнитное поле якоря. Расчет магнитной цепи машины.
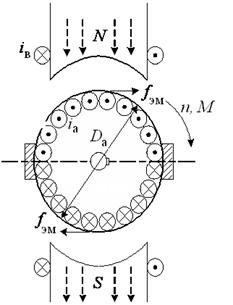
Реакцией якоря называется воздействие магнитного поля, создаваемого током якоря, на магнитное поле главных полюсов машины. В режиме холостого хода ток якоря равен нулю и магнитное поле машины образуется только главными полюсами .Оно симметрично относительно оси главных полюсов и относительно геометрической нейтрали.
Если отключить обмотку возбуждения и подключить якорь к источнику питания, то протекающий в обмотке якоря ток создаст магнитное поле. Магнитная ось полюсов этого поля совпадает с осью щеток и перпендикулярна оси поля главных полюсов. Вращение якоря не влияет на картину поля якоря, т.к. распределение тока в обмотке якоря остается постоянным.
В рабочем
режиме машины включены обе обмотки и магнитное поле образуется суммированием
обоих полей. В результате ось магнитного поля поворачивается на некоторый
угол ![]() и на этот же
угол поворачивается физическая нейтраль. Так как при одинаковом
направлении вращения, направление тока якоря двигателя и генератора разное, то
направление магнитного поля якоря и смещение физической нейтрали в этих режимах
будет противоположеным. В режиме генератора нейтраль смещается в сторону
вращения, а в режиме двигателя – против вращения.
и на этот же
угол поворачивается физическая нейтраль. Так как при одинаковом
направлении вращения, направление тока якоря двигателя и генератора разное, то
направление магнитного поля якоря и смещение физической нейтрали в этих режимах
будет противоположеным. В режиме генератора нейтраль смещается в сторону
вращения, а в режиме двигателя – против вращения.
В результате смещения часть проводников параллельной ветви, расположенных между щеткой и нейтралью окажется под полюсом противоположной полярности и будет создавать тормозной момент.
Изменение
нагрузки машины будет приводить к изменению тока якоря и соответствующему
усилению или ослаблению его магнитного поля. Поэтому угол ![]() будет изменяться
с нагрузкой.
будет изменяться
с нагрузкой.
Помимо смещения нейтрали реакция якоря уменьшает общий магнитный поток за счет того, что поле под главными полюсами искажается. Под одним краем полюса оно ослабляется, а под другим усиливается, но усиление поля в результате насыщения края полюса оказывается меньше ослабления и результирующий магнитный поток уменьшается, что отрицательно сказывается на энергетических показателях машины.
Смещение физической нейтрали оказывает также негативное влияние на процесс коммутации.
Наиболее эффективным средством уменьшения влияния реакции якоря является компенсационная обмотка. Она укладывается в специальные пазы главных полюсов и включается последовательно в цепь якоря. Магнитное поле компенсационной обмотки направлено встречно и, как следует из ее названия, компенсирует магнитное поле якоря.
Ток компенсационной обмотки равен току якоря, поэтому компенсация происходит при всех режимах от холостого хода до полной нагрузки. В результате поле машины под главными полюсами остается практически неизменным. Однако в межполюсном простанстве часть МДС якоря остается не скомпенсированной и оказывает отрицательное влияние на работу щеточно-коллекторного узла. Компенсация реакции якоря в этой области осуществляется применением добавочных полюсов. Компенсационные обмотки сильно усложняют и удорожают машину, поэтому они используются только в специальных двигателях средней и большой мощности.
Другим способом компенсации является увеличение зазора между краями главных полюсов и якорем. Для сохранения потока при увеличении зазора требуется увеличение МДС обмотки возбуждения. Это приводит к увеличению полюсов, катушек и в целом к ухудшению массогабаритных показателей. Увеличение зазора используют в машинах малой и средней мощности.
В микромощных машинах (< 1 кВт) реакцию якоря компенсируют установкой щеток на физическую нейтраль. При этом полная компенсация возможна только при одном значении тока якоря, т.е. только при какой-либо одной постоянной нагрузке. Однако в результате сдвига все же в машине существенно улучшается коммутация.




Билет 6
Вопрос 1 Электромагнитные силы и моменты в ЭМ.
(тоже самое ,что и в 1 вопросе моего 5 билета)
Вопрос 2 Электромагнитные моменты от высших гармоник магнитного поля.



Вопрос 3 Влияние поля якоря на величину магнитного потока и ЭДС машины.
Смещение магнитного поля генератора. Под реакцией якоря понимают явление воздействия магнитного поля, создаваемого током якоря, на магнитное поле главных полюсов.
При холостом ходе генератора магнитное поле машины образовано только главными полюсами . Оно симметрично относительно оси полюсов и его ось совпадает с осью полюсов. Когда генератор работает с нагрузкой, по обмотке якоря протекает ток, который создает свое магнитное поле , называемое полем якоря. Ось магнитного поля якоря совпадает с линией, соединяющей щетки, т.е. с геометрической нейтралью, и перпендикулярна оси главных полюсов. При вращении якоря распределение тока в проводниках якоря остается неизменным и поле якоря — неподвижным в пространстве. Индукция этого поля пропорциональна току в якоре.
При
работе генератора с нагрузкой поле якоря накладывается на поле полюсов. В
генераторе создаётся результирующее поле (рис 1.10, В), повернутое по направлению
вращения якоря на некоторый угол у относительно поля главных полюсов.
Физическая нейтральная линия оказывается повернутой на тот же угол ![]() относительно
геометрической нейтральной линии. При изменении нагрузки индукция поля якоря
изменяется, изменяется и угол
относительно
геометрической нейтральной линии. При изменении нагрузки индукция поля якоря
изменяется, изменяется и угол ![]() .
.
Результаты смещения магнитного поля. Смещение физической нейтральной линии вызывает нежелательные последствия, приводящие к ухудшению работы генератора:
Ø уменьшается ЭДС, так как щетки оказываются установленными в точках, между которыми разность потенциалов не максимальная;
Ø переключение проводников обмотки якоря из одной параллельной ветви в другую происходит не на физической нейтрали, а на геометрической, где расположены щетки и где результирующее поле В′≠ 0, что, как будет показано в следующем параграфе, приводит к искрению щеток и обгоранию коллекторных пластин;
Ø индукция магнитного поля под полюсами распределяется неравномерно; под краем полюса, на который якорь набегает, она уменьшается, а под краем полюса, с которого сбегает, – увеличивается настолько, что может создаться насыщение сбегающего края полюса и зубцов якоря. В результате появится продольная размагничивающая составляющая поля якоря, направленная против поля главных полюсов, что также приведет к уменьшению ЭДС якоря. Кроме того, в части проводников, находящихся в зоне магнитного насыщения, наводится значительная ЭДС, которая может вызвать пробой изоляции между соседними коллекторными пластинами и повышенное искрение на коллекторе.
Смещение
магнитного поля двигателя. У двигателя постоянного тока при том же направлении
тока в якоре направление вращения якоря по сравнению с генератором
противоположное, а картина распределения полей одинаковая. Результирующее поле
и физическая нейтральная линия оказываются повернутыми на угол ![]() против
направления вращения якоря.
против
направления вращения якоря.
Это приводит к нежелательным последствиям: уменьшается вращающий момент двигателя, так как часть проводников параллельной ветви, расположенных между щеткой и физической нейтралью, будет находиться в зоне полюса противоположной полярности – эта часть проводников будет создавать тормозной момент.
Способы уменьшения влияния реакции якоря. Наиболее действенным и распространенным средством уменьшения влияния реакции якоря на работу машины является применение дополнительных полюсов. Дополнительные полюсы устанавливаются на геометрической нейтральной линии между главными полюсами .
Их обмотка включается последовательно с обмоткой якоря и намотана так, что ее магнитное поле направлено против магнитного поля якоря. В зоне геометрической нейтральной линии создаются условия, благоприятные для безыскровой работы щеток (более подробно этот вопрос рассмотрен в следующем параграфе). Дополнительные полюсы выполняют свои функции во всех режимах работы машины: при изменении нагрузки одновременно изменяются ток и поле якоря, ток и поле дополнительных, полюсов; при переходе машины в режим двигателя одновременно изменяется направление токаи поля якоря и направление тока и поля дополнительных полюсов.
Для выравнивания индукции под полюсами в быстроходных машинах большой мощности (свыше 80 кВт на один полюс) применяют компенсационную обмотку, которую закладывают в специальные пазы в полюсных наконечниках .
Компенсационная обмотка включается последовательно с обмоткой якоря и обмоткой дополнительных полюсов. Магнитное поле компенсационной обмотки всегда направлено навстречу магнитному полю якоря и таким образом оно компенсирует поле якоря в зоне главных полюсов.
В машинах малой мощности (до нескольких сотен ватт) вместо дополнительных полюсов применяют сдвиг щеток с геометрической нейтральной линии. При этом, создаются условия, уменьшающие искрение щеток из-за влияния реакции якоря.
!!!Ниже второй вариант ответа ,но он мне нравится больше!!! (Слова Ромы)
Под реакцией якоря в синхронных машинах понимают воздействие магнитного поля статора (якоря) на магнитное поле ротора. Реакция якоря оказывает сильное влияние на все электромагнитные процессы в машине. Явление реакции по определению связано с магнитным полем статора, поэтому характер и степень влияния реакции определяется током статора, т.е. нагрузкой машины.
 Рассмотрим этот
процесс на примере синхронного генератора. Изобразим вращающееся магнитное поле
ротора вектором
Рассмотрим этот
процесс на примере синхронного генератора. Изобразим вращающееся магнитное поле
ротора вектором![]() . При вращении
оно пересекает неподвижные проводники обмоток статора и наводит в них ЭДС
. При вращении
оно пересекает неподвижные проводники обмоток статора и наводит в них ЭДС ![]() , отстающую от
потока
, отстающую от
потока ![]() на
на ![]() . Ток
статора
. Ток
статора ![]() создает
магнитный поток статора
создает
магнитный поток статора ![]() , совпадающий с
ним по направлению. В зависимости от характера нагрузки ток статора может иметь
фазовый сдвиг по отношению к ЭДС
, совпадающий с
ним по направлению. В зависимости от характера нагрузки ток статора может иметь
фазовый сдвиг по отношению к ЭДС ![]() в пределах
в пределах ![]() .
.
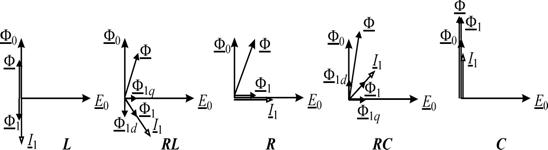
При
чисто активной нагрузке (R) ток ![]() и магнитный
поток
и магнитный
поток ![]() статора
совпадают по фазе с
статора
совпадают по фазе с ![]() и результирующий
магнитный поток машины
и результирующий
магнитный поток машины ![]() оказывается
смещенным относительно потока ротора
оказывается
смещенным относительно потока ротора ![]() на некоторый
угол в сторону запаздывания. В результате смещения потока магнитное поле
ослабляется под набегающими краями полюсов ротора и усиливается под сбегающими.
Несмотря на то, что в результате смещения сбегающие края полюсов
подмагничиваются, результирующее поле машины ослабляется, т.к. из-за насыщения
полюсов в зоне подмагничивания оно проявляется слабее, чем размагничивание на
набегающих краях. В целом при активной нагрузке магнитное поле ослабляется и
деформируется.
на некоторый
угол в сторону запаздывания. В результате смещения потока магнитное поле
ослабляется под набегающими краями полюсов ротора и усиливается под сбегающими.
Несмотря на то, что в результате смещения сбегающие края полюсов
подмагничиваются, результирующее поле машины ослабляется, т.к. из-за насыщения
полюсов в зоне подмагничивания оно проявляется слабее, чем размагничивание на
набегающих краях. В целом при активной нагрузке магнитное поле ослабляется и
деформируется.
При
чисто индуктивной нагрузке (L) ток статора и магнитный поток отстают от
ЭДС ![]() на
на ![]() . Поток
статора
. Поток
статора ![]() оказывается
направленным встречно по отношению к потоку ротора
оказывается
направленным встречно по отношению к потоку ротора ![]() и сильно
размагничивает машину. Однако, в отличие от активной нагрузки, искажения поля
за счет смещения потока не происходит.
и сильно
размагничивает машину. Однако, в отличие от активной нагрузки, искажения поля
за счет смещения потока не происходит.
При
чисто емкостной нагрузке (C) ток статора и магнитный поток опережают ЭДС
на ![]() и поле в машине
усиливается потоком реакции, направленным согласно с потоком ротора. Искажения
поля в этом случае также не происходит, а усиление поля вследствие насыщения
оказывается выраженным слабо.
и поле в машине
усиливается потоком реакции, направленным согласно с потоком ротора. Искажения
поля в этом случае также не происходит, а усиление поля вследствие насыщения
оказывается выраженным слабо.
В
случае активно-реактивной нагрузки (RL и RC) поток
статора оказывается смещенным на угол меньший, чем ![]() , в сторону
запаздывания или опережения. В этом случае магнитный поток статора
, в сторону
запаздывания или опережения. В этом случае магнитный поток статора ![]() , можно
разложить на продольную
, можно
разложить на продольную ![]() и
поперечную
и
поперечную ![]() составляющие.
Продольная составляющая будет оказывать при RL нагрузке
размагничивающее действие, а при RC нагрузке –
подмагничивающее. Поперечная составляющая будет вызывать деформацию поля,
аналогичную деформации при активной нагрузке.
составляющие.
Продольная составляющая будет оказывать при RL нагрузке
размагничивающее действие, а при RC нагрузке –
подмагничивающее. Поперечная составляющая будет вызывать деформацию поля,
аналогичную деформации при активной нагрузке.
Таким
образом реакция якоря в синхронной машине изменяет величину и направление
магнитного потока, в отличие от асинхронной машины, у которой ![]() . Негативное
влияние реакции якоря в синхронных машинах снижают увеличением рабочего зазора.
. Негативное
влияние реакции якоря в синхронных машинах снижают увеличением рабочего зазора.
Магнитный
поток ![]() вызывает
искажение магнитного поля ротора, которое проявляется в статоре в виде
ЭДС
вызывает
искажение магнитного поля ротора, которое проявляется в статоре в виде
ЭДС ![]() . Так как
поток
. Так как
поток ![]() линейно связан с
током статора
линейно связан с
током статора ![]() , то эту ЭДС
можно представить в комплексной форме через некое индуктивное сопротивление в
виде
, то эту ЭДС
можно представить в комплексной форме через некое индуктивное сопротивление в
виде ![]() .
.
Билет 7
Вопрос 1 Преобразование переменного тока в постоянный и постоянного в переменный
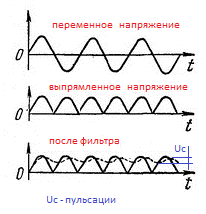
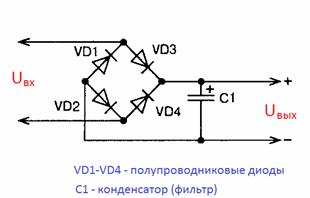
Процесс получения из переменного тока постоянного называется выпрямлением, а устройства – выпрямителями. Основная деталь выпрямителя – полупроводниковый диод, проводящий ток только в одном направлении. В результате выпрямления получается пульсирующий ток, меняющий со временем свою величину, но не изменяющий знак. Затем пульсации устраняют при помощи фильтров, простейшим из них является конденсатор. Полностью пульсации устранить невозможно, а их конечный уровень зависит от схемы выпрямителя и качества фильтра. Сложность и стоимость выпрямителей зависит от величины пульсаций на выходе и от максимальной мощности на выходе. Для преобразования в переменный ток используются инверторы. Принцип их работы состоит в генерации переменного напряжения с формой, максимально приближенной к синусоидальной. Что бы получить такую форму достаточно подключить аккумулятор к потребителю сначала одной полярностью, а затем через короткий промежуток отключить аккумулятор, а потом снова подключить, но уже обратной полярностью. И такие переключения повторять все время через равные промежутки времени. Если выполнять таких переключений 50 раз за секунду, то на потребитель будет подаваться переменное напряжение частотой 50 Гц. Роль переключателей чаще всего выполняют транзисторы или тиристоры, работающие в ключевом режиме. Пример такого устройства – автомобильный инвертор для подключения к бортовой сети бытовых приборов или инструмента. Чем качественнее и дороже инвертор, тем больше его мощность или точнее выдаваемое им напряжение приближается к синусоиде. Выделяют три основные схемы инверторов напряжения :
· Мостовой ИН без трансформатора (инвертор)
·

· С нулевым выводом трансформатора (инвертор)
·

· Мостовая схема с трансформатором (Инвертор)
 (я бы не советовал их все рисовать, но накидать что-то
если что сможете)
(я бы не советовал их все рисовать, но накидать что-то
если что сможете)
· Диодный мост для выпрямления тока
Вопрос 2 Г- образная схема замещения АД.
При практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора. Более удобной при практических расчетах является Г-образная схема замещения.
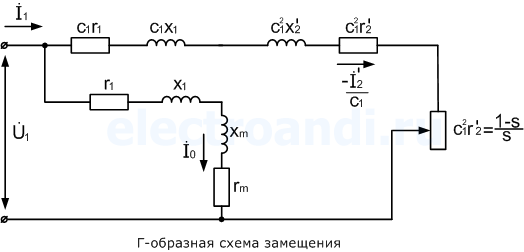
В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.

Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Вопрос 3 Влияние поперечного поля якоря на потенциальную кривую коллектора
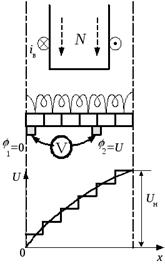 Если
подсоединить вольтметр и один конец жестко закрепить на одной щётке, её
потенциал принять за 0: φ1 =0, другой конец
подсоединяем к щетке, которая скользит по поверхности коллектора, то по
показаниям вольтметра можно снять потенциальную кривую коллектора
Если
подсоединить вольтметр и один конец жестко закрепить на одной щётке, её
потенциал принять за 0: φ1 =0, другой конец
подсоединяем к щетке, которая скользит по поверхности коллектора, то по
показаниям вольтметра можно снять потенциальную кривую коллектора
При протекании тока по обмотке якоря, на каждый проводник с током, находящийся в магнитном поле, действует электромагнитная сила. Элементарная электромагнитная сила и электромагнитный момент, действующие на один проводник, по закону электромагнитной силы
Поперечный разрез МПТ
Инфы в инете мало, ничего лучше не
нашёл, но вы держитесь, можете сами поискать, но я в вас не уверен.
Билет 8
Вопрос 1 Законы: электромагнитной индукции, Кирхгофа, полного тока,Ома для магнитной цепи.
Зако́н электромагни́тной инду́кции Фараде́я является основным законом электродинамики, касающимся принципов работы трансформаторов, дросселей и генераторов.
Для любого контура индуцированная ЭДС равна скорости изменения магнитного потока проходящего через этот контур, взятой со знаком минус. или другими словами:
Генерируемая ЭДС пропорциональна скорости изменения магнитного потока.
![]()
![]()
Первый закон Кирхгофа вытекает из закона сохранения заряда. Он состоит в том, что алгебраическая сумма токов, сходящихся в любом узле, равна нулю.
![]()
Второй закон Кирхгофа: алгебраическая сумма падений напряжений на отдельных участках замкнутого контура, произвольно выделенного в сложной разветвленной цепи, равна алгебраической сумме ЭДС в этом контуре

При анализе магнитных полей важное значение имеет закон полного тока, который в интегральной форме имеет вид:

и гласит о том, что линейный интеграл по замкнутому контуру l от напряженности магнитного поля равен полному току, протекающему сквозь сечение, ограниченное этим контуром.
Под полным током понимают алгебраическую сумму токов проводимости, переноса и смещения.
В дифференциальной форме закон полного тока можно записать следующим образом:
![]()
Магнитный поток в магнитной цепи пропорционален магнитному напряжению UM и обратно пропорционален магнитному сопротивлению RM.

Вопрос 2 Определение трансформаторов. Классификация, применение, особенности конструкции.
Электрический трансформатор - это устройство, предназначенное для изменения величины напряжения в сети переменного тока. Принцип действия трансформаторов основан на явлении электромагнитной индукции. При подключении первичной обмотки к источнику переменного тока, в обмотках генерируется магнитное поле, которые взывает ЭДМ во вторичных обмотках. Данная ЭДС пропорциональна числу витков в первичных и вторичных обмотках. Отношение электродвижующей силы в первичной обомотке/вторичной называется коэффициентом трансформации.
Основными элементами
конструкции трансформатора являются первичные и вторичные обмотки и
ферромагнитный магнитопровод (обычно замкнутого типа). Обмотки расположены на
магнитопроводе и индуктивно связаны друг с другом. Использование магнитопровода
позволяет саккумулировать большую часть магнитного поля внутри трансформатора,
что повышает КПД устройства. Магнитопровод обычно состоит из набора
металлических пластин, покрытых изоляцией, для предотвращения возникновения
«паразитных» токов внутри магнитопровода.
Зачастую часть вторичной обмотки служит часть первичной и наоборот. Данный тип
трансформаторов называют автотрансформаторами. В этом случае концы первичных
обмоток подключаются к сети переменного напряжения, а концы вторичной
присоединяются к потребителям электроэнергии.
Основная классификация трансформаторов.
· По назначению: измерительные трансформаторы тока, напряжения, защитные, лабораторные, промежуточные.
· По способу установки: наружные, внутренние, шинные, опорные, стационарные, переносные.
· По числу ступеней: одноступенчатные, многоступенчатые (каскадные).
· По номинальному напряжения: низковольтные, высоковольтные.
· По типу изоляции обмоток: c сухой изоляцией, компаундной, бумажно-маслянной.
Основные типы трансформаторов
Силовые трансформаторы - наиболее
распространенный тип электро. трансформаторов. Они
предназначены для изменения энергии переменного тока в электросетях
энергосистем, в сетях освещения или питания электрооборудования. Применяются
для создания комплектных трансформаторных подстанций.
Классифицируются по количеству фаз и номинальному напряжения.
Наиболее известные низковольтные однофазные и трехфазные трансформаторы
серии ТП и ОСМ.
Среди высоковольтных трансформаторов, наиболее используемые в данной момент в
энергетике, трансформаторы ТМГ-с масляным охлаждением в
герметичном баке.. Преимуществами данной серии вляется высокий КПД (до 99%),
высокие показатели защиты от перегрева, высокие эксплуатационные
характеристики, и минимальное обслуживание во время использования.
Помимо силовых, существуют трансформаторы различных типов и назначения: для
измерения больших напряжений и токов (измерительные трансформаторы), для
преобразования напряжения синусоидальной формы в импульсное
(пик-трансформаторы), для преобразования импульсов тока и напряжения
(импульсные трансформаторы), для выделения переменной составляющей тока, для
разделения электрических цепей на гальванически не связанные между собой части,
для их согласования и т.д.
Измерительные трансформаторы- электротехнические
устройства, предназначенные для изменения уровня напряжения с высокой точностью
трансформации.
Классифицируются по назначению, изменению уровня напряжения или тока.
Также делятся на низковольтные трансформаторы тока типа Т, 066
ТШ-0,66, ТТИ-066 и Высоковольтные трансформаторы
напряжения, такие как НАМИТ и ЗНОЛ.
Вторичные обмотки данных устройств соединены с измерительными устройствами
(амперметрами, счетчиками электроэнергии, вольтметрами, фазометрами, реле тока
и т.д.) Применение данного оборудования позволяет изолировать измеряющее
оборудование от больших токов и напряжений измеряемой цепи, и создает
возможность стандартизации измеряющего оборудования.
Автотрансформаторы – устройства, обмотки
которого соеденены гальванически между собой. Благодыря малым
коэффициентам трансформации, автотрансформаторы имеют меньшие габариты и
стоимость оп сравнению с многообмоточными. Из недостатков необходимо отметить
невозможность гальванической изоляции цепей.
Основные сферы использования автотрансформаторов – изменение напряжения в
пусковых устройствах крупных электрических машин переменного тока, в системах
релейной защиты при плавном регулировании напряжения. В случае реализации
в конструкции автотрансформатора изменения количества рабочих витков вторичной
обмотки, появляется возможность сохранять уровень вторичного напряжения при
изменении первичного напряжения. Наибольшее распространение данный данный
механизм используется в стабилизаторах напряжения.
Импульсный трансформатор - это устройство
с ферромагнитным сердечником, используемый для изменения импульсов тока
или напряжения.
Импульсные трансформаторы наиболее часто используются в
электронновычислительных устройствах, системах радиолокации, импульсной
радиосвязи и т.д. в качестве измерительного устройства в счетчиках
электроэнергии.
Основное требование импульсным трансформаторам, - при изменении импульса форма
импульса должна сохраняться. Это достигается максимальным уменьшением
межвитковой емкости, индуктивности рассеивания за счет использования
применением сердечников малой величины, взаимным расположение и уменьшением
числа обмоток.
Пик-трансформатор - устройство, изменяющее напряжение синусоидальной формы в импульсное напряжение с изменяющейся через каждые полпериода полярностью. Пик-трансформаторы применяются в качестве генераторов импульсов главным, высоковольтных исследовательских установках и системах автоматики…
Вопрос 3 Круговой огонь на колеекторе.
Отмечено, что искрение на коллекторе может быть вызвано также
потенциальными причинами, причем оно может перерасти в круговой огонь.
Перекрытие мощной электрической дугой поверхности
коллектора между щетками противоположной полярности или одним из
щеткодержателей и корпусом называют круговым огнем. Круговой огонь всегда
опасен, так как приводит к серьезным повреждениям электрической машины.
Возникновение кругового огня сопровождается сильным световым и звуковым
эффектом, в крупных машинах это похоже на взрыв бомбы.
Причиной возникновения кругового огня является
чрезмерно высокое напряжение между смежными коллекторными пластинами, которые
могут оказаться замкнутыми через «мостик», образуемый угольной пылью или более
крупными осколками щетки. По «мостику» проходит ток, происходит его сгорание и
возникает короткая дуга, что равноценно замыканию части машины, состоящей из
одной секции, на малое сопротивление. Увеличивающийся ток дуги вызывает
оплавление коллекторных пластин, а сама дуга, развиваясь, замыкает и соседние
пластины.
Если же напряжение между смежными коллекторными
пластинами не превышает 33—34 В, то даже при выгорании проводящего «мостика»
круговой огонь не возникает. Нельзя, как это часто допускают, объяснить
возможность возникновения кругового огня повышенной ионизацией коллекторной
камеры от сильного искрения.
Схема очень быстротечного (0,01—0,001 с)
процесса перерастания единичной вспышки в круговой огонь показана на рис. 1,
где 1 — первичная дуга, 2 — газы и пары меди, 1 — мощная дуга. Такая
быстротечность приводит к тому, что не удается создать от него какую-либо
защиту.
 |
Ток в дуге, возникшей из- за наличия проводящего «мостика» между
пластинами а и b, быстро увеличивается и пространство над коллектором
ионизируется, т. е. заполняется парами раскаленной меди.
Коллектор вращается, дуга перекрывает несколько
пластин, ток возрастает. Дальнейшее развитие процесса носит случайный характер.
Процесс на рис. 1 снят при скорости 4000 кадров в секунду.
Очевидно, чем тоньше межламельная изоляция и чем
меньше размеры коллекторного деления, тем меньшее напряжение между
коллекторными пластинами может быть допущено. Критерием здесь служит значение
напряжения на единицу длины окружности коллектора
emах = uк max/bк <8--9 В/мм
Искрение под щетками способствует возникновению
кругового огня, так как при этом происходит интенсивный износ щетки, появляется
вероятность образования «мостиков». Но само по себе искрение с вытягиванием,
как считалось долгое время, дуги из-под щетки не приводит к круговому огню.
Так, когда у тягового двигателя на стенде отключили обмотку добавочных полюсов,
возникшее при этом весьма сильное и достаточно продолжительное искрение не
привело к круговому огню. Однако в другом случае на мощном генераторе,
работающем в режиме холостого хода со снятыми щетками, круговой огонь возникал
при достаточно высоком напряжении между коллекторными пластинами, когда между
последними осколком щетки создавали «мостик» или вспомогательным электродом
искусственно зажигали короткую дугу.
Итак, для уменьшения вероятности появления
круговых огней необходимо устанавливать оптимальное межламельное напряжение и
улучшать состояние узла щетка-коллектор.
Важно содержать в чистоте поверхность коллектора,
миканитовых манжет, систематически чистить канавки между коллекторными
пластинами и щеткодержатели, удалять с поверхности коллектора следы поджогов,
заусенцы, своевременно менять изношенные и сколотые щетки, поддерживать
нормальное давление нажимных пальцев. Склонность тяговых двигателей к круговым
огням повышается при неудовлетворительной динамике щеток, особенно при
прохождении колесной парой стыков на путях. Желательно иметь наиболее
эластичное нажимное устройство, прижимающее щетки к коллектору.
Билет 9
Вопрос 1 Определение трансформаторов. Классификация, применение, особенности конструкции
Трансформатор представляет собой статический электромагнитный аппарат с двумя (или больше) обмотками, предназначенный чаще всего для преобразования переменного тока одного напряжения в переменный ток другого напряжения. Преобразование энергии в трансформаторе осуществляется переменным магнитным полем. Трансформаторы широко применяются при передаче электрической энергии на большие расстояния, распределении ее между приемниками, а также в различных выпрямительных, усилительных, сигнализационных и других устройствах.
В зависимости от назначения различают силовые
трансформаторы, измерительные трансформаторы напряжения и трансформаторы тока
Силовые трансформаторы преобразуют переменный ток одного напряжения в
переменный ток другого напряжения для питания электроэнергией потребителей. В
зависимости от назначения они могут быть повышающими или понижающими. В
распределительных сетях применяют, как правило, трехфазные двухобмоточные
понижающие трансформаторы, преобразующие напряжение 6 и 10 кВ в напряжение 0,4
кВ
Измерительные трансформаторы напряжения – это промежуточные трансформаторы, через которые включаются измерительные приборы при высоких напряжениях. Благодаря этому измерительные приборы оказываются изолированными от сети, что делает возможным применение стандартных приборов (с переградуированием их шкалы) и тем самым расширяет пределы измеряемых напряжений.
Трансформаторы напряжения используются как для измерения
напряжения, мощности, энергии, так и для питания цепей автоматики, сигнализаций
и релейной защиты линий электропередачи от замыкания на землю.
В ряде случаев трансформаторы напряжения могут быть использованы как маломощные
понижающие силовые трансформаторы или как повышающие испытательные
трансформаторы (для испытания изоляции электрических аппаратов).
Трансформатор тока представляет собой
вспомогательный аппарат, в котором вторичный ток практически пропорционален
первичному току и предназначенный для включения измерительных приборов и реле в
электрические цепи переменного тока.
Трансформаторы тока служат для преобразования тока любого значения и напряжения
в ток, удобный для измерения стандартными приборами (5 А), питания токовых
обмоток реле, отключающих устройств, а также для изолирования приборов и
обслуживающего их персонала от высокого напряжения.
Вопрос 2 Рабочие характеристики АД
Рабочими характеристиками называют графические зависимости частоты вращения п2 (или скольжения s),момента на валу М2 , тока статора I1 , коэффициента полезного действия η и cos φ1 от полезной мощности Р2 при U1 = const и f1 = const. Их определяют экспериментально или путем расчета по схеме замещения или круговой диаграмме.
Примерный вид рабочих характеристик асинхронного двигателя показан на рис. 4.25. Частота вращения, ток статора, момент на валу, потребляемая и полезная мощности приведены на графике в относительных единицах. Рабочие характеристики строят только для зоны практически устойчивой работы двигателя, т. е. до скольжения (1,1 ÷ l,2)sном .

Частота вращения ротора. При переходе от режима холостото хода к режиму полной нагрузки частота вращения n2 изменяется незначительно, так как при проектировании двигателей для уменьшения потерь мощности в роторе ΔРэл2 необходимо, чтобы скольжение при номинальном режиме не превышало 0,02—0,06. Следовательно, скоростная характеристика асинхронного двигателя является «жесткой».
Вопрос 3 Искрение на коллекторе. Способы улучшения коммутации
С практической точки зрения важно, чтобы коммутация происходила без значительного искрения у контактных поверхностей щеток, так как сильное искрение портит поверхность коллектора и щеток и делает длительную работу машины невозможной.
Причины искрения на щетках можно подразделить на механические и электромагнитные.
Механические причины искрения большей частью связаны нарушением контакта между щеткой и коллектором. Такие нарушения вызываются: 1) неровностью поверхности коллектора, 2) плохой шлифовкой щеток к коллектору, 3) боем коллектора, если он превышает 0,2 – 0,3 мм, 4) выступанием отдельных коллекторных пластин, 5) выступанием слюды между коллекторными пластинами, 6) заеданием щеток в щеткодержателях (тугая посадка), 7) вибрацией щеток (нежесткость токосъемного аппарата, плохая балансировка машины, слишком свободное расположение щеток в щеткодержателях с зазорами более 0,2 – 0,3 мм, слишком большое расстояние между обоймой щеткодержателя и коллектором – более 2 – 3 мм и так далее). Искрение может быть вызвано также неравномерным натягом щеточных пружин, несимметричной разбивкой щеточных пальцев и щеток по окружности и другими причинами механического характера.
Электромагнитные причины искрения на щетках связаны с характером протекания электромагнитных процессов в коммутируемых секциях. Обеспечение достаточно благоприятного протекания этих процессов является важной задачей при создании машин постоянного тока, в особенности крупных.
Способы улучшения коммутации:
1. уменьшение реактивной э.д.с.:
· за счёт уменьшения индуктивности секции; для этого уменьшают число витков (делают одновитковыми);
· пазы якоря делают открытыми и не очень глубокими (не более 4,5-5,5 мм),
· одну сторону каждой секции располагают в верхнем слое паза, а другую – в нижнем;
· уменьшают ширину щётки (в тяговых двигателях и генераторах щётка перекрывает 3,5-4,5 коллекторных пластины);
· в крупных машинах уменьшают длину, окружную скорость и суммарный ток проводников в пазах якоря, увеличивают диаметр якоря(поэтому машины постоянного тока имеют примерно на 20-25% меньшую мощность, чем машины переменного тока при тех же габаритных размерах и частоте вращения).
2. компенсацией реактивной э.д.с. и э.д.с. вращения от потока якоря:
· при изменении нагрузки машины от холостого хода до несколько большей её номинальной применяют добавочные полюсы между главными полюсами (для создания дополнительного внешнего коммутирующего магнитного поля);магнитный поток направлен против потока якоря в коммутационной зоне и компенсирует его; коммутирующая э.д.с. должна быть примерно равна реактивной э.д.с. (не более 0,8-1,0 В);
· для увеличения предельной нагрузки поперечное сечение сердечников добавочных полюсов увеличивают и устанавливают значительно большие воздушные зазоры под главными полюсами;
· обмотку добавочного полюса размещают ближе к якорю;
· в воздушный зазор между остовом и торцами сердечников добавочных полюсов устанавливают немагнитные прокладки для обеспечения без искровой работы щеток и замедления магнитного насыщения сердечников;
· путём смещения щеток с геометрической нейтрали на физическую. Этот способ не дает автоматической настройки при изменении нагрузки, как применение добавочных полюсов.
3. уменьшение тока коммутации iк путем увеличения сопротивления цепи коммутирующей секции:
· переход от медных щёток к электрографитированным (с достаточно высоким активным сопротивлением: слишком высокое сопротивление приведет к увеличению потерь и нагреву щеток, что может ухудшить коммутацию);
·применение разрезных щёток.
Билет 10
Вопрос 1 Принцип действия трансформаторов
Трансформаторы бывают однофазные и многофазные, с одной, двумя или большим количеством обмоток. Рассмотрим схему и принцип работы трансформатора на примере простейшего однофазного трансформатора.
Из чего состоит трансформатор? Во простейшем случае из одного металлического сердечника и двух обмоток. Обмотки электрически не связаны одна с другой и представляют собой изолированные провода.
Одна обмотка (ее называют первичной) подключается к источнику переменного тока. Вторая обмотка, называемая вторичной, подключается к конечному потребителю тока.
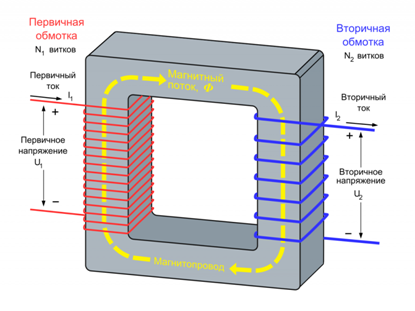
Когда трансформатор подключен к источнику переменного тока, в витках его первичной обмотки течет переменный ток величиной I1. При этом образуется магнитный поток Ф, который пронизывает обе обмотки и индуцирует в них ЭДС.
Бывает, что вторичная обмотка не находится под нагрузкой. Такой режимы работы трансформатора называется режимом холостого хода. Соответственно, если вторичная обмотка подключена к какому-либо потребителю, по ней течет ток I2, возникающий под действием ЭДС.
Величина ЭДС, возникающей в обмотках, напрямую зависит от числа витков каждой обмотки. Отношение ЭДС, индуцированных в первичной и вторичной обмотках, называется коэффициентом трансформации и равно отношению количества витков соответствующих обмоток.
Путем подбора числа витков на обмотках можно увеличивать или уменьшать напряжение на потребителе тока с вторичной обмотки.
Вопрос 2 Круговая диаграмма АД. Определение рабочих характеристик по круговой диаграмме
Характеристики n2 = f(P2 ) и n2 = f(М) можно построить по круговой диаграмме. Для этого задаются рядом точек на окружности токов и находят соответствующие им значения полезной мощности, электромагнитного момента и скольжения. При расчетах, не требующих большой точности, полезную мощность Р2 принимают равной Рмех (пренебрегая потерями мощности ΔРт ), т. е. считают, что она пропорциональна отрезку AM круговой диаграммы (см. рис. 4.17). Более точно ее определяют путем построения на круговой диаграмме специальной линии полезной мощности О"К (см. рис. 4.18,6), которую получают, соединяя точку О" реального холостого хода с точкой К (в режимах, соответствующих точкам О и К, мощность Р2 = 0). В этом случае величина Р2 пропорциональна отрезку AM, заключенному между окружностью токов и линией 0"К.
Электромагнитный момент пропорционален отрезку AE круговой диаграммы (см. рис. 4.17). Чтобы определить максимальный момент (рис. 4.26, а), через точку Ам проводят касательную к окружности токов параллельно линии ОТ и из этой точки опускают перпендикуляр на диаметр окружности токов. Максимальный момент пропорционален отрезку Aм Eм , где Ем - точка пересечения перпендикуляра с прямой ОТ.

Рис. 4.26. Круговая диаграмма со шкалами скольжения (а) и cos φ (б)
Скольжение s = ΔРэл2 /Рэм можно найти по круговой диаграмме как отношение отрезков FE/AE. Однако поскольку измерение малого отрезка FE может дать существенную погрешность, для определения s надо построить шкалу скольжения (рис. 4.26, а). Для этого на произвольном расстоянии от линии O'G проводят прямую, параллельную линии ОТ, до пересечения ее с линией ОК (или с ее продолжением) и получают точку N. Затем из точки О восставляют перпендикуляр к диаметру окружности до пересечения с построенной прямой и находят точку Р. Линия ОА (вектор тока - Í'2 ) пересекается с прямой PN в точке Q. Из подобия полученных при таком построении треугольников (ΔOFE ~ ΔOPN и ΔOAF ~ ΔOPQ) имеем
FE/OP = OE/PN; OP/AE = PQ/OE.
Перемножая эти отношения, находим
FE/AE = PQ/PN = s.
Следовательно, линия PN представляет собой шкалу скольжения, на которой отрезок PQ, отсекаемый линией ОА (вектором — Í'2 ), позволяет получить скольжение s. Зная скольжение s, по формуле n2 = n1 (I — s) можно определить частоту вращения ротора.
Вращающий момент на валу двигателя. Зависимость между моментом М2 и полезной мощностью Р2 определяется соотношением
Р2 = М2 ω2 ,
где ω2 — угловая скорость ротора.
+Поскольку n2 изменяется мало, эта зависимость близка к линейной. Чтобы определить момент М2 на валу двигателя, по круговой диаграмме находят электромагнитный момент М, а затем из него вычитают момент, обусловленный трением в двигателе, — Мт = ΔРт /ω2 :
М2 = М - Мт.
Первичная мощность. Как видно из (4.58), при заданном напряжении Ux первичная мощность пропорциональна активной составляющей тока. Поэтому на круговой диаграмме мощность Ps для произвольного значения тока I, будет пропорциональна длине перпендикуляра Fd, опущенного из конца вектора I, на ось абсцисс (рис. 4.15). Таким образом, отрезок Fd, измеренный в масштабе тока /и, и умноженный на 0,5mUs, дает мощность

Линия ON, до которой берутся отрезки Fd, называется линией подводимой мощности.

Рис. 4.15. К определению потерь и мощностей из круговой диаграммы
Механическая мощность. Опустим перпендикуляр Fc на линию диаметра Og. Из рис. 4.16 следует

Рис. 4.16. К определению скольжения по круговой диаграмме
Выражение (4.59) представляет мощность, определяемую током Is, a |Zi(.v)| - модуль сопротивления для этого тока. Далее, в соответствии с рис. 4.16 для тангенсов углов [3i(.v = 1), р2(±00) и p(.v = л>) согласно (4.57) можно записать


откуда видно, что отрезки Ьс, ас, Fa пропорциональны сопротивлениям R], Ri + Ri и #2(1 - s)/s. Поэтому, представляя исходное выражение (4.59) как


получаем
Таким образом, для определения механической мощности достаточно на диаграмме опустить перпендикуляр Fc на линию диаметра Og, найти отрезок Fa, измеренный в масштабе тока т„ и умножить сто на —U.. Линия О А, до которой определяются отрезки 2
перпендикуляра, называется линией механической мощности.
Электромагнитная мощность. Значение электромагнитной мощности получим, представляя исходное выражение для (5.59) в следующем виде:

откуда с учетом пропорциональности отрезков соответствующим сопротивлениям запишем

Итак, для определения электромагнитной мощности следует
измерить отрезок Fb в масштабе тока и умножить его на —Us. Ли-
2
ния OG, до которой измеряются отрезки перпендикуляра, называется линией электромагнитной мощности. Она также называется линией электромагнитного момента, что становится понятным, если учесть, что связь между указанными величинами определяется механической скоростью бегущего поля coi Ip.
Коэффициент мощности найдется либо непосредственным измерением угла, либо с помонц>ю простого графического построения, приведенного на рис. 4.17.
Скольжение. На основании энергетической диаграммы скольжение s определим через отношение потерь в обмотке ротора к электромагнитной мощности. Если обратиться к круговой диаграмме, то для точки F скольжение найдется из отношения отрезков s = ab/bF=p,JPjM. Однако гораздо удобнее использовать графическое построение, приведенное на рис. 4.17. Любую точку Т круговой диаграммы соединяют с точкой G (s = ±°°), параллельно TG проводят шкату скольжений. Точка Т пересечения шкалы скольжений с прямой ОТ соответствует л- = 0, точка Т2 пересечения шкалы скольжений с прямой TG соответствует скольжению s = I. Точка 7з пересечения шкалы с прямой FT дает искомое скольжение для точки F.
Доказательство вытекает из подобия треугольников FbO и 7Т|Г3, откуда следует, что

Коэффициент полезного действия. Значение КПД г|, как говорилось выше, найдется из круговой диаграммы без учета механических и добавочных потерь. Для точки F он будет равен отношению механической мощности к подводимой:

Здесь полезно привести следующее выражение для КПД. Если пренебречь потерями мощности от тока намагничивания До, то его значение будет равно

Для малых значений скольжения, которые соответствуют режиму, близкому к номинальному, слагаемое sR/R2 « 1, поэтому можно записать

Из приведенного выражения следует, что с ростом скольжения КПД уменьшается. Именно это обстоятельство и объясняет, почему асинхронные машины выполняются с малым значением скольжения, для номинального режима оно не превышает величины (л’ц» 0,03...0,04), при этом значение критического скольжения составляет sm = 0,12.. .0,15.
Возвращаясь к круговой диаграмме КПД, для точки F запишем

где ас = R + R2 ab = R2 ТТт, = S(F).
Круговая диаграмма позволяет, не прибегая к трудоемким вычислениям, быстро найти все основные величины, характеризующие работу асинхронной машины. Но основная ее ценность в другом - она ддет возможность наглядно увидеть связь параметров машины с ее рабочими характеристиками, техническим залднием на проектирование.
Вопрос 3 Генераторы постоянного тока
Генера́тор постоя́нного то́ка — электрическая машина, преобразующая механическую энергию в электрическую энергию постоянного тока.
Классификация и параметры генераторов постоянного тока
В основу классификации генераторов постоянного тока положен вид источника питания обмотки возбуждения. Различают:
1. генераторы с независимым возбуждением, обмотка возбуждения которых питается от постороннего источника (аккумулятора или другого источника постоянного тока). У генераторов малой мощности (десятки ватт) основной магнитный поток может создаваться постоянными магнитами,
2. генераторы с самовозбуждением, обмотка возбуждения которых питается от самого генератора. По схеме соединения обмоток якоря и возбуждения по отношению к внешней цепи бывают: генераторы параллельного возбуждения, у которых обмотка возбуждения включена параллельно с обмоткой якоря (шунтовые генераторы), генераторы последовательного возбуждения, у которых эти обмотки включены последовательно (сериесные генераторы), генераторы смешанного возбуждения, у которых одна обмотка возбуждения включена параллельно обмотке якоря, а вторая — последовательно (компаундные генераторы).
Номинальный режим генератора постоянного тока определяется номинальной мощностью — мощностью, отдаваемой генератором приемнику, номинальным напряжением на зажимах обмотки якоря, номинальным током якоря, током возбуждения, номинальной частотой вращения якоря. Эти величины обычно указываются в паспорте генератора.
Конструкция генераторов постоянного тока
В процессе технического прогресса в электромашиностроении конструктивный вид машин постоянного тока изменяется, хотя основные детали остаются теми же.
Рассмотрим устройство одного из типов машин постоянного тока, выпускаемых промышленностью. Как указывалось, основными частями машины являются статор и якорь. Статор , изготовленный в виде стального цилиндра, служит как для крепления других деталей, так и для защиты от механических повреждений и является неподвижной частью магнитной цепи.
К статору крепятся магнитные полюсы , которые могут представлять собой постоянные магниты (у машин малой мощности) или электромагниты. В последнем случае на полюсы насаживается обмотка возбуждения , питаемая постоянным током и создающая неподвижный относительно статора магнитный поток.
При большом числе полюсов их обмотки включают параллельно или последовательно, но так, чтобы северный и южный полюсы чередовались Между главными полюсами располагаются добавочные полюсы со своими обмотками. К статору крепятся подшипниковые щиты .
Якорь машины постоянного тока набирается из листовой стали для уменьшения потерь мощности и от вихревых токов. Листы изолируются друг от друга. Якорь является подвижной (вращающейся) частью магнитопровода машины. В пазы якоря укладывается обмотка якоря, или рабочая обмотка .
Билет 11
Вопрос 1 Основные уравнения и векторная диаграмма приведенного трансформатора.
Приведенный трансформатор – это
трансформатор, который оказывает на цепь такое же влияние, как реальный
трансформатор, но коэффициент трансформации его равен единице.
Приведенный трансформатор имеет приведенные
(скорректированные) параметры .
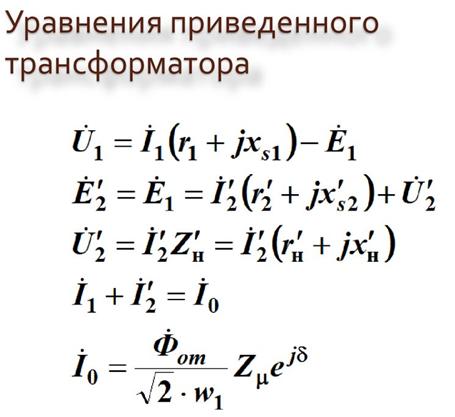
Изображение векторной диаграммы приведенного трансформатора.
Она позволяет наглядно представить соотношении и углы сдвига различных величин трансформатора.
а) активная
нагрузка, ![]() .
.
Построения
векторной диаграммы удобно начинать с вектора рабочего потока сердечнике ![]() ,
амплитуда которого
,
амплитуда которого ![]() Векторную
диаграмму строим на основании уравнении электрического состоянии и уравнение
токов с учетом сдвига фаз между магнитном потоком Э.Д.С. и токами приведенного
трансформатора, в этом случае масштаб всех величин вторичной обмотки одинаков с
масштабами величин первичной обмотки.
Векторную
диаграмму строим на основании уравнении электрического состоянии и уравнение
токов с учетом сдвига фаз между магнитном потоком Э.Д.С. и токами приведенного
трансформатора, в этом случае масштаб всех величин вторичной обмотки одинаков с
масштабами величин первичной обмотки.
Построение векторной диаграммы аналогично построению диаграммы идеализированного трансформатора (Рис. 2.8).
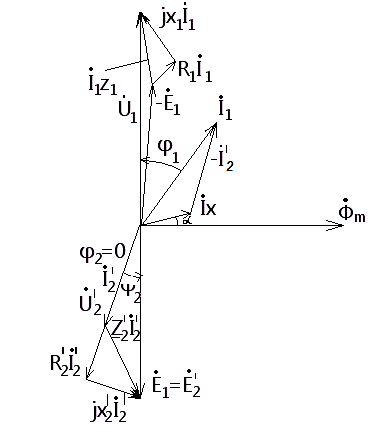
Рисунок 2.8 Векторная диаграмма нагруженного трансформатора при активной нагрузке
Ток
Х.Х ![]() опережает
по фазе магнитный поток
опережает
по фазе магнитный поток ![]() на
угол
на
угол ![]() ,
определяемый потерями в стали магнитопроводе. Векторы Э.Д.С.
,
определяемый потерями в стали магнитопроводе. Векторы Э.Д.С. ![]() отстают
от вектора магнитного потока
отстают
от вектора магнитного потока ![]() на
90˚. Приведенный ток
на
90˚. Приведенный ток ![]() сдвинут
относительно приведенного Э.Д.С.
сдвинут
относительно приведенного Э.Д.С. ![]() на
угол
на
угол ![]() =arctg
=arctg ![]()
где ![]() -
активное сопротивление приемника, приведенным к числу витков первичной обмотки
трансформатора.
-
активное сопротивление приемника, приведенным к числу витков первичной обмотки
трансформатора.
При активной
нагрузке падение напряжения на нем совпадает по фазе с ![]()
![]()
Падение
напряжения на нагрузке ![]() сопротивлении
сопротивлении ![]() уравновешивает
Э.Д.С.
уравновешивает
Э.Д.С. ![]() . Вектор
тока в первичной обмотке
. Вектор
тока в первичной обмотке ![]() равен
сумме векторов тока
равен
сумме векторов тока ![]() и
приведенного тока во вторичной обмотке
и
приведенного тока во вторичной обмотке ![]() ,
направленного в противоположную сторону (Рис. 2.8).
,
направленного в противоположную сторону (Рис. 2.8).
Напряжения
источника питания ![]() уравновешивает
Э.Д.С. –
уравновешивает
Э.Д.С. – ![]() и
падение напряжения на внутреннем сопротивлении первичной обмотки
и
падение напряжения на внутреннем сопротивлении первичной обмотки ![]()
б) индуктивная
нагрузка, ![]() . (Рис.
2.9)
. (Рис.
2.9)
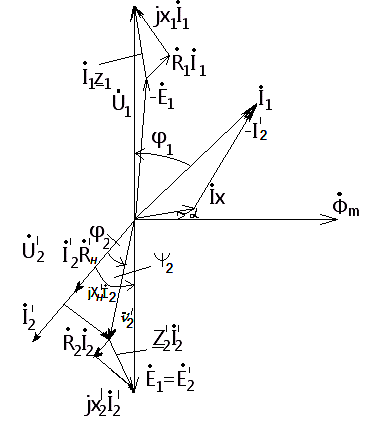
Рисунок 2.9 Векторная диаграмма нагруженная трансформатора при индуктивной нагрузке
![]() arctg
arctg ![]() ;
; ![]()
Напряжение на
нагрузке ![]() опережает
ток
опережает
ток ![]() на
угол
на
угол ![]()
в) емкостная
нагрузка ![]() (Рис.2.10)
(Рис.2.10)
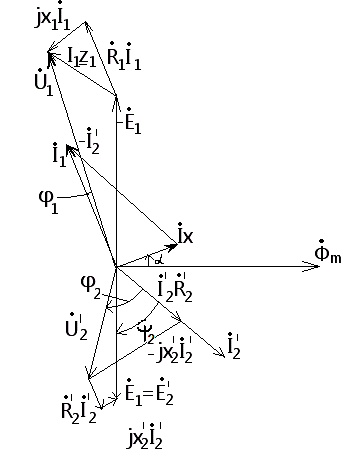
Рисунок 2.10 Векторная диаграмма нагруженного трансформатора при емкостной нагрузке
![]()
![]()
![]()
![]() ,
, ![]()
При
значительной емкостной составляющей нагрузки падение напряжения в емкостной
составляющей сопротивления и индуктивное падение напряжения во второй обмотке
частично компенсируют друг друга. В результате ![]() может
оказаться больше, чем Э.Д.С.
может
оказаться больше, чем Э.Д.С. ![]() .
.
Как следует из векторной диаграммы трансформатора, при чисто емкостной нагрузки возрастание напряжения на вторичной обмотки может быть столь значительно, что это окажется опасным для изоляции. Возрастание напряжения на трансформаторе при емкостной нагрузке называется перевозбуждением трансформатора.
Вопрос 2 Пуск трехфазных АД. Способы пуска с улучшенными пусковыми характеристиками.
Прямой пуск
Подразумевает подключение намоток статора к электросети без «посредников». Подходит моторам с короткозамкнутым ротором. Это двигатели небольшой мощности, у которых при подключении напрямую к электросети статорных обмоток, образующимися пусковыми токами не вызывается перегрев, способный вывести технику из строя.
В асинхронных двигателях соотношение индуктивности обмоток к их сопротивлению (L/R) небольшое. И оно тем меньше, чем меньше мощность устройства. Поэтому во время запуска образующийся свободный ток быстро затухает, и им можно пренебречь. Брать в учет будет только ту силу тока, которая установилась в результате переходного процесса.
Ниже на рисунке (а) представлена схема магнитного пускателя, обозначенного буковой К. Технически это электромагнитный выключатель, часто применяемый при запуске электродвигателей с короткозамкнутым ротором. Он необходим для автоматического разгона по естественной механической характеристике (обозначим М) от начала запуска (точка П) до момента, когда М станет равным моменту сопротивления (Мс).
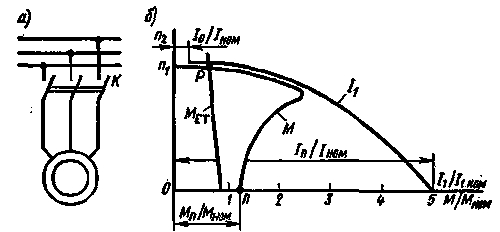
На картинке (б) представлен график зависимости пускового тока от начального момента. Исходя из него, ускорение разгона равно разности абсцисс графиков М и М(с). В таком случае, если Мпуск будет меньше Мс, то разогнаться у электродвигателя не получится. Чтобы получить оптимальное для разгона значение Мпуск для мотора с короткозамкнутым ротором используйте формулу (коэффициент скольжения s равен единице):
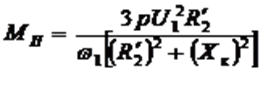
Отношение Мпуск к номинальному (Мном) – это величина, определяемая как кратность начального момента. Обозначается kпм. Коэффициент для двигателей с короткозамкнутым ротором входит в диапазон от 1 до 1,8 и устанавливается ГОСТом.
Пример. Если kпм=1,4, а Мном=5000 Н*м, то прямой запуск должен начинаться с Мп = 7000 Н*м.
Внимание! Нельзя превышать установленные ГОСТом нормы. Это ведет к повышению активного сопротивления на вращающемся элементе мотора.
Прямой запуск двигателя обладает преимуществами:
· Дешевизна;
· Простота;
· Минимальный нагрев обмоток при запуске.
Недостатки метода:
· Величина Мпуск составляет до 300% от Мном;
· Пусковой ток составляет до 800% от номинального (смотрите графики снизу).
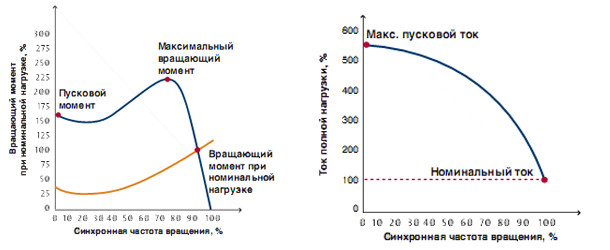
Даже с перечисленными недостатками прямой запуск остается наиболее предпочтительным для асинхронных электродвигателей с короткозамкнутым ротором, т.к. обеспечивает высокие энергетические показатели.
Пуск с понижением напряжения
Подходит для запуска электродвигателя высокой мощности, но так же оптимален для аналогов средней, если напряжение в рабочей сети не позволяем разогнать мотор с помощью прямого пуска.
Для понижения напряжения существует три способа:
1. Переключение намоток статора с треугольника (нормальная схема) на звезду (пусковая схема). Запуск начинается со звезды, а при достижении номинальной частоты происходит переключение на треугольник. При этом напряжение, питающее фазы статорных обмоток, падает в 1,73 раз. Это позволяет уменьшиться во столько же раз фазным токам, а линейные сокращаются втрое.
2. Запуск с добавочным сопротивлением, приводящим к падению вольтажа на статорной обмотке (рисунок а). На момент пуска в электроцепь включают реакторы или резисторы (реактивное и активное сопротивление соответственно).
3. Пуск с подключением через трансформатор понижающего типа с несколькими автоматически переключаемыми ступенями (рисунок б).
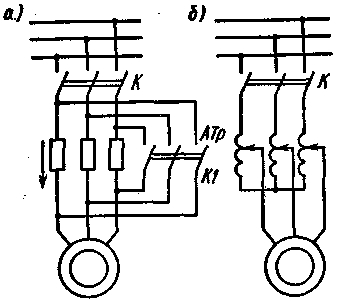
Главное преимущество – возможность разгона двигателя почти при том же напряжении, которое необходимо для нормальной работы. К недостаткам относится лишь падение Мп и Ммакс (максимальный момент). Эти величины прямо пропорционально зависят от напряжения: чем меньше Вольт, тем меньше моменты. Поэтому с нагрузкой мотор не запустится.
Соединение ротора с реостатом во время включения
Метод подходит для включения в работы моторов с фазным ротором. Если роторная цепь включает в себя реостат, то активное сопротивление повышается. При этом точка К на рисунке а ниже перемещается ближе к О и обозначается К`. Это не приводит к уменьшению Ммакс, зато обеспечивает повышение Мпуск. Вместе с этим критическое скольжение увеличивается, и зависимость момента от s смещается к зоне больших скольжений. Число же оборотов смещается в зону меньших вращательных частот (рисунки б и в).
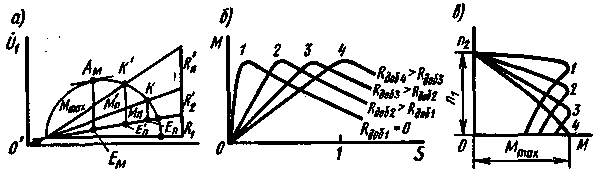
Обычно реостат, используемый для пуска мотора, имеет от 3 до 6 ступеней (смотрите рисунок а ниже). Пусковое сопротивление плавно уменьшается, что обеспечивается большой Мпуск. Изначально мотор приводится в ход по четвертой характеристике, проиллюстрированной на рисунке б. Она соответствует сопротивлению запускающего реостата и обеспечивает максимальную пусковую мощность.
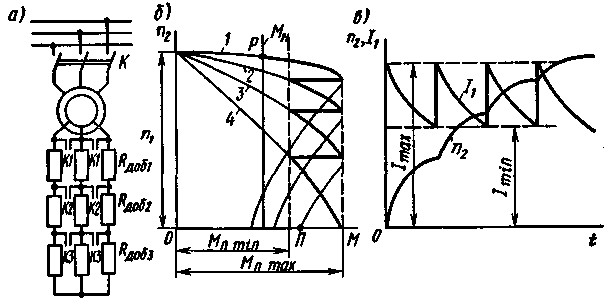
Вращающий момент (Мвр) уменьшается с ростом оборотов. При некотором минимальном значении необходимо отключить часть реостата, чтобы Мвр возрос снова до максимального (смотрите третью характеристику). Но обороты растут, поэтому Мвр снова уменьшается. Тогда отключается еще одна часть реостата, и начинается работа по второй характеристике. Когда реостат двигателя с фазным ротором отключают вовсе, пусковой процесс завершается. Мотор продолжает работу по характеристике 1.
Запуск в ход таким методом характеризуется изменением Мвр от максимального до минимального значения. Сопротивление в данном случае уменьшается ступенчато по ломаной кривой линии (выделена жирным на графике). Выключение частей реостата осуществляется автоматически или вручную.
Преимущество запуска электродвигателя с фазным ротором с использованием реостата заключается в возможности включать его при Мпуск, близком к Ммакс. Пусковые токи при этом минимальны. Изменение силы тока проиллюстрировано на рисунке в.
Недостатков хватает. Во-первых, это сложность включения. Во-вторых, это необходимость использования совсем не дешевых моторов с фазным ротором. Характер работы хуже, чем у аналогов с короткозамкнутым ротором при мощности одинакового значения – это третий минус. Это объясняет, почему электродвигатели с фазным ротором используют преимущественно в случае возникновения сложностей с запуском других двигателей.
АД с улучшенными пусковыми свойствами
Стремление совместить достоинства асинхронных двигателей с короткозамкнутым ротором (высокая надежность) и фазным ротором (большой пусковой момент) привело к созданию этих двигателей. Они имеют короткозамкнутую обмотку ротора специальной конструкцией. Различают двигатели с обмоткой ротора в виде двойной «беличьей клетки» (рис. 5.20а) и с глубоким пазом (рис. 5.20б).
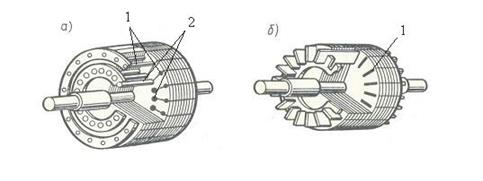
Рис. 5.20
На рис. 5.20 показаны конструкции ротора двигателей с улучшенными пусковыми свойствами.
У двигателя с двойной «беличьей клеткой» на роторе закладывается две короткозамкнутые обмотки. Обмотка 1 выполняет роль пусковой, а обмотка 2 является рабочей. Для получения повышенного пускового момента пусковая обмотка должна обладать большим активным сопротивлением, чем рабочая обмотка. Поэтому обмотка 1 выполняется из материала с повышенным удельным сопротивлением (латунь), чем обмотка 2 (медь). Сечение проводников, образующих пусковую обмотку, меньше, чем у рабочей обмотки. За счет этого повышается активное сопротивление пусковой обмотки.
Рабочая обмотка, расположенная глубже, охватывается большим магнитным потоком, чем пусковая. Поэтому индуктивное сопротивление рабочей обмотки значительно больше, чем пусковой. За счет этого в момент пуска в ход, когда частота тока ротора имеет наибольшее значение, ток в рабочей обмотке, как следует из закона Ома, будет небольшим и в создании пускового момента будет участвовать в основном пусковая обмотка, имеющая большое активное сопротивление. По мере разгона двигателя частота тока ротора падает, уменьшается и индуктивное сопротивление обмоток ротора, это приводит к увеличению тока в рабочей обмотке, за счет этого в создании вращающего момента будет участвовать, в основном, рабочая обмотка. Т.к. она обладает малым активным сопротивлением, естественная механическая характеристика двигателя будет жесткой.
Аналогичная картина наблюдается у двигателя с глубоким пазом (рис. 5.20б). Глубокий стержень обмотки (1) можно представить в виде нескольких проводников, расположенных по высоте паза. За счет высокой частоты тока в обмотке ротора в момент пуска в ход происходит «вытеснение тока к поверхности проводника». За счет этого в создании пускового момента участвует только верхний слой проводников обмотки ротора. Сечение верхнего слоя значительно меньше сечения всего проводника. Поэтому при пуске в ход обмотка ротора обладает повышенным активным сопротивлением, двигатель развивает повышенный пусковой момент. По мере разгона двигателя плотность тока по сечению проводников обмотки ротора выравнивается, сопротивление обмотки ротора снижается.
В целом эти двигатели имеют жесткие механические характеристики, повышенный пусковой момент и меньшую кратность пускового тока, чем двигатели с короткозамкнутым ротором обычной конструкцией.
Вопрос 3 Механические электромеханические и рабочие характеристики двигателей с различными способами возбуждения.
Механические и рабочие характеристики двигателей постоянного тока
Механические характеристики.
Механические характеристики двигателей принято подразделять на естественные и
искусственные. Естественная характеристика соответствует номинальному
напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток
двигателя. Если хотя бы одно из перечисленных условий не выполняется,
характеристика называется искусственной.
Уравнения электромеханической ω=f(I я) и механической
ω=f(M эм.) характеристик могут быть найдены из уравнения равновесия
ЭДС и напряжений для якорной цепи двигателя, записанного на основании второго
закона Кирхгофа:
Uя=(Eя+Iя)(Rя+Rд), (5.35)
где R я – активное сопротивление
якоря.
Преобразуя (5.35) получим уравнение электромеханической характеристики
ω=(Uя-Iя(Rя+Rд))/kФ. (5.36)
В соответствии ток якоря I я=M эм./kФ и выражение (5.36) преобразуется в уравнение механической характеристики:
ω=Uя/ kФ – ( Rя+ Rд)/( kФ)2)Mэм.. (5.37)
Это уравнение можно представить в виде ω= ω о.ид.- Δ ω, где
ωо.ид.=Uя/kФ (5.38)
ω о.ид - угловая скорость
идеального холостого хода ( при Iя=0 и, соответственно, Мэм.=0 ); Δω=
Мэм.[(Rя+Rд)/(kФ)2]– уменьшение угловой скорости, обусловленное нагрузкой на
валу двигателя и пропорциональное сопротивлению якорной цепи.
Семейство механических характеристик при номинальном напряжении на якоре и
потоке возбуждения и различных добавочных сопротивлениях в цепи якоря
изображено на рис. 5.20,а.
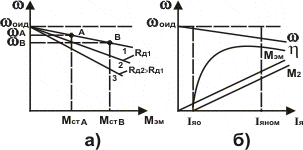
Рис.5.20
15. Электромеханические характеристики электродвигателей постоянного тока.
В зависимости от способа подачи напряжения на обмотку возбуждения и обмотку якоря электрические машины постоянного тока делятся на:
1. генераторы (двигатели) с независимым возбуждением;
2. генераторы (двигатели) с самовозбуждением.
В зависимости от способа соединения обмотки якоря и обмотки возбуждения электрические машины с самовозбуждением делятся на:
1. генераторы (двигатели) с параллельным возбуждением;
2. генераторы (двигатели) с последовательным возбуждением;
3. генераторы (двигатели) смешанного возбуждения, имеют две обмотки возбуждения.
Электромеханические характеристики снимаются на электродвигателе - одна величина электрическая (Iн), другая- механическая (n или Мвр).
Электромеханические характеристики – это скоростная электромеханическая характеристика зависимости частоты вращения якоря от тока нагрузки n(Iн) и характеристика зависимости вращающего момента от тока нагрузки Мвр(Iн). Электромеханические характеристики снимаются при неизменном подаваемом напряжении.
15.1. Электродвигателя с параллельным возбуждением.
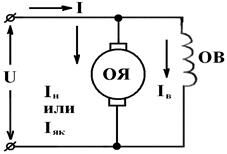 При изменении нагрузки (при
изменении момента сопротивления) будет изменяться ток только в обмотке якоря, и
не будет изменяться в обмотке возбуждения.
При изменении нагрузки (при
изменении момента сопротивления) будет изменяться ток только в обмотке якоря, и
не будет изменяться в обмотке возбуждения.
![]()
Вращающийся момент зависит только от тока нагрузки и характеристика будет иметь
вид прямой линии.
|
|
|
|
Зависимость вращающегося момента от тока нагрузки. |
Скоростная электромеханическая характеристика. |
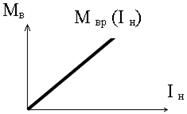
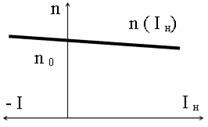
![]()
При увеличении нагрузки частота вращения якоря будет уменьшаться только
из-за увеличения падения напряжения в обмотке якоря. Но, т.к. сопротивление
обмотки якоря мало, то и падение напряжения в обмотке якоря мало и составляет
примерно 4 % от номинального напряжения при номинальном токе. Характеристика
будет иметь вид прямой линии с малым наклоном и называется жесткой (когда при
изменении одной величины в широких пределах другая величина изменяется
незначительно).
При уменьшении нагрузки частота вращения якоря увеличивается, противо Э.Д.С.
возрастает и при какой-то n0 величина наводимой в обмотке якоря Э.Д.С.
сравнивается с приложенным напряжением.
 При
дальнейшем разгоне Э.Д.С. становится выше приложенного напряжения, ток по
обмотке якоря пойдет в другом направлении уже под действием Э.Д.С. – двигатель
автоматически перешел в генераторный режим.
При
дальнейшем разгоне Э.Д.С. становится выше приложенного напряжения, ток по
обмотке якоря пойдет в другом направлении уже под действием Э.Д.С. – двигатель
автоматически перешел в генераторный режим.
Электромеханические характеристики для двигателя с независимым возбудителем,
имеют внешний вид, подобный электромеханическим характеристикам двигателя с
параллельным возбуждением из-за Ф = Const.
15.2.Электродвигателя с последовательным возбудителем.
Ток нагрузки равен току якоря и току возбуждения. При
изменении нагрузки будет изменяться ток в обмотке якоря и одновременно в
обмотке возбуждения, а, значит, будет изменяться и магнитный поток в
соответствии с кривой намагничивания
|
|
Кривая намагничивания. |
||
|
|
|
|
|
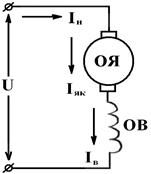
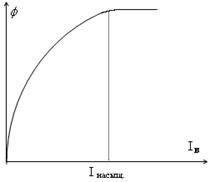
где w - число витков.
Вращающий момент зависит от тока в квадрате и характеристика будет иметь вид
параболы. Так происходит до магнитного насыщения полюсов. При дальнейшем
увеличении нагрузки магнитный поток будет оставаться неизменным, вращающий
момент будет зависеть только от тока и характеристика переходит в прямую линию.
|
Зависимость вращающегося момента от тока нагрузки. |
Скоростная электромеханическая характеристика. |
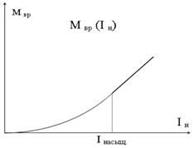
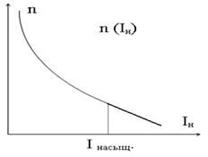
 При увеличении нагрузки
частота вращения якоря будет уменьшаться из-за увеличения падения напряжения в
обмотках двигателя и, в большей степени, из-за увеличения магнитного потока,
что вызывает резкое понижение частоты вращения якоря. По мере роста тока
нагрузки замедляется рост магнитного потока, а затем наступает магнитное
насыщение полюсов (см. выше кривую намагничивания). При дальнейшем увеличении
нагрузки магнитный поток остается постоянным, частота вращения якоря понижается
только из-за увеличения падения напряжения в обмотках двигателя. Характеристика
переходит в прямую линию.
При увеличении нагрузки
частота вращения якоря будет уменьшаться из-за увеличения падения напряжения в
обмотках двигателя и, в большей степени, из-за увеличения магнитного потока,
что вызывает резкое понижение частоты вращения якоря. По мере роста тока
нагрузки замедляется рост магнитного потока, а затем наступает магнитное
насыщение полюсов (см. выше кривую намагничивания). При дальнейшем увеличении
нагрузки магнитный поток остается постоянным, частота вращения якоря понижается
только из-за увеличения падения напряжения в обмотках двигателя. Характеристика
переходит в прямую линию.
Скоростная электромеханическая характеристика мягкая. При уменьшении нагрузки
частота вращения увеличивается, но уменьшается и магнитный поток. Поэтому,
наводимая противо Э.Д.С. в обмотке якоря не может преодолеть приложенное
напряжение. Электродвигатели с последовательным возбуждением автоматически не
переходят в генераторный режим.
https://studizba.com/lectures/106-transport/1413-jelektricheskie-zheleznye-dorogi/26056-16-jelektromehanicheskie-harakteristiki-jelektrodvigatelej-postojannogo-toka.html
https://studopedia.ru/16_46654_mehanicheskie-i-rabochie-harakteristiki-dvigateley-postoyannogo-toka.html
(Половина взята с 2 сайтов)
Механические характеристики электродвигателей переменного тока
При рассмотрении работы электропривода, вращающего рабочий орган производственного механизма, необходимо, прежде всего, выявить соответствие механических свойств электродвигателя и производственного механизма. Поэтому для правильного проектирования и экономичной эксплуатации электропривода необходимо изучить и механические характеристики электрических машин, и производственных механизмов.
Механическая характеристика электродвигателя определяет зависимость его скорости w от развиваемого им момента М. Часто вместо угловой скорости со используют внесистемную физическую величину - частоту вращения п, так как эти величины пропорциональны друг другу:

В этом случае механической характеристикой электродвигателя называется зависимость его частоты вращения п от развиваемого им момента М, то есть п = f(M).
Степень изменения скорости с изменением момента у различных типов электрических машин неодинакова и различается в зависимости от жесткости механических характеристик (рис. 1.2).
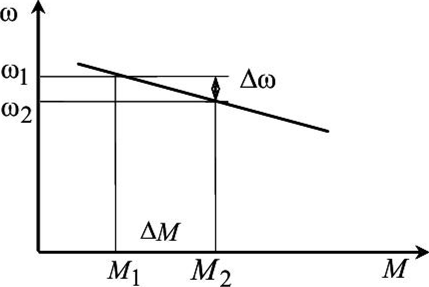
Рис. 1.2. Определение жесткости механической характеристики
Под жесткостью механической характеристики кр будем понимать
отношение приращения момента ДМ к приращению скорости двигателя Дсо:

где М,, to, - момент и угловая скорость в первой точке механической характеристики; М„ оо, - момент и угловая скорость во второй точке механической характеристики.
Механические характеристики электродвигателей переменного тока можно разделить на четыре основных типа в зависимости от их жесткости :
- • абсолютно жесткая механическая характеристика, при которой скорость с изменением момента остается неизменной. Из (1.2) следует, что если Д(л = 0 , то =оо. Такой характеристикой обладают синхронные двигатели (зависимость 1 на рис. 1.3), синхронные гистерезисные двигатели на рабочем участке механической характеристики (зависимость 2 на рис. 1.3);
- • жесткая механическая характеристика, отличающаяся незначительным изменением угловой скорости с изменением момента. Жесткой механической характеристикой обладают асинхронные двигатели (кривая 3, рис. 1.3);
- • мягкая механическая характеристика отличается значительным изменением угловой скорости с изменением момента. Такой характеристикой обладают коллекторные двигатели переменного тока (кривая 4, рис. 1.3);

Рис. 1.3. Механические характеристики электродвигателей
• абсолютно мягкая механическая характеристика, при которой момент двигателя остается неизменным с изменением угловой скорости. Из выражения (1.2) следует, что если AM =0 , то А:р = 0. Абсолютно
мягкой механической характеристикой обладают, например, асинхронные двигатели в моментных электроприводах (зависимость 5 на рис. 1.3).
При любом типе механической характеристики электродвигателя вращающий момент двигателя определяется нагрузкой на его валу, то есть моментом сопротивления Мс.
Билет 12
Вопрос 1 Характеристики трансформаторов: внешняя, КПД
Внешняя характеристика – это зависимость напряжения на вторичной обмотке трансформатора U2 от тока во вторичной обмотке I2 (U2 = f(I2)), т.е. внешняя характеристика показывает, как изменяется напряжение на выходе трансформатора U2 при увеличении тока нагрузки I2 (при постоянном характере нагрузки и номинальном U1).
Как у любого источника, напряжение на вторичной обмотке трансформатора U2 отличается от ЭДС Е2 на величину падения напряжения на внутреннем сопротивлении трансформатора.
Из уравнения (3.5)
![]() (3.6)
(3.6)
видно, что U2 линейно зависит от I2 и внутреннего сопротивления трансформатора. Более точный анализ показывает, что на внешнюю характеристику влияет также характер нагрузки, т.е. тип ZH

КПД
мощных трансформаторов – очень высокий, (0.98–0.99). 

Коэффициентом полезного действия трансформатора называется отношение отдаваемой активной мощности или мощности на выходе к подведенной активной мощности на входе
![]()


Коэффициент полезного действия трансформатора зависит, от его загрузки, так как потери в стали постоянны, а потери в обмотках пропорциональны квадрату тока. Если коэффициент нагрузки, к. п. д. трансформатора
![]()

Расчеты и опыт показывают, что наибольший к. п. д. у трансформатора будет при коэффициенте нагрузки , когда потери в обмотках равны потерям в магнитопроводе.
(https://studfile.net/preview/3166710/page:4/)
Вопрос 2 Двигатель с двойной клеткой на роторе
Двигатель с двумя клетками на роторе. Обладает значительно лучшими пусковыми характеристиками, чем простой асинхронный двигатель. На рис. изображены: 1 – рабочая клетка, 2 – пусковая клетка. Стержни пусковой клетки обычно выполняют из латуни или бронзы – материалов с более высоким, чем у меди активным сопротивлением. Индуктивное сопротивление рассеяния пусковой клетки не велико, т.к. она расположена вблизи воздушного зазора. Рабочая клетка, выполненная из меди обладает меньшим активным сопротивлением. В момент пуска двигателя ток ротора проходит в основном по верхней (пусковой) клетке, обладающей меньшим индуктивным сопротивлением. Повышенное активное сопротивление этой клетки обеспечивает значительный пусковой момент при пониженном пусковом токе. По мере увеличения частоты вращения ротора уменьшается частота тока в роторе, при этом индуктивное сопротивление клетки уменьшается, происходит перераспределение тока из области пусковой клетки в область рабочей клетки. Т.о. при пуске данного АД происходит постепенное перераспределение пускового момента между клетками.

Вопрос 3 Двигатели постоянного тока. Преобразование электрической энергии в механическую.
Двигатель постоянного тока — это машина которая преобразует электрическую энергию в механическую. То есть, потребляя для своего вращения электрический ток, она приводит во вращение различные устройства. Это могут быть водяной или воздушный насос, стиральная машина или кофемолка. Электродвигателем постоянного тока, разумеется, такой двигатель называется потому, что для его питания используется постоянный электроток.

Модель двигателя постоянного тока состоит из ротора и статора. Ротор — это подвижная часть двигателя. Статор — неподвижная (статичная) часть. В данном случае статор двигателя является индуктором, а ротор якорем. То есть, ток питания сети протекает в роторе.

(https://zen.yandex.ru/media/ehlektroinform/princip-deistviia-dvigatelia-postoiannogo-toka--pochemu-on-vrascaetsia-5f0b35b490379d39c708321b)
Преобразование электрической энергии в механическую энергию.
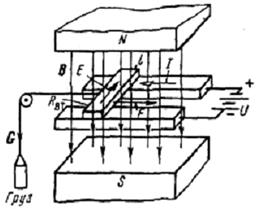
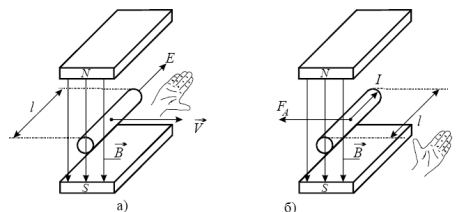
Рис. Модель для пояснения преобразования электрической энергии в механическую.
Иллюстрация к закону электромагнитной индукции (а), и закону Ампера (б)
К проводнику длиной l, помещенному в магнитное поле, приложено напряжение источника U, и в цепи существует ток I. На проводник действует электромагнитная сила F=BlI, направление которой определяется по правилу левой руки (находим направление силы по направлению тока и магнитного потока).
Под действием этой силы, если F>G, проводник длиной начнет перемещаться и груз станет подниматься.
При движении проводника в магнитном поле в нем будет индуцироваться ЭДС E=Blv.
Согласно принципу Ленца, направление этой ЭДС противоположно направлению тока. Результатом действия ЭДС будет происходить нагрев проводника.
Рэл = Рмех + Рtо
Таким образом, полученная проводником электрическая энергия преобразуется в механическую и тепловую энергию.
Это простейшая модель электрического двигателя:
Преобразование электрической энергии в механическую (и обратное преобразование) происходит с помощью магнитного поля. Электрическая энергия, забираемая из питающей сети, запасается в магнитном поле, пронизывающем воздушный зазор. Запасенная магнитная энергия преобразуется в механическую. Когда двигатель совершает механическую работу, такое же количество энергии должно поступать в магнитное поле.
(https://infourok.ru/lekciya-dlya-kolledzha-po-elektrotehnike-na-temu-zakon-elektromagnitnoj-indukcii-preobrazovanie-elektricheskoj-energii-v-mehanic-4425821.html)
Билет 13
Вопрос 1 Параллельная работа трансформаторов
Параллельной работой двух или нескольких трансформаторов называется работа при параллельном соединении их обмоток как на первичной, так и на вторичной сторонах. При параллельном соединении одноименные клеммы обмоток трансформаторов присоединяют к одному и тому же проводу сети
Параллельная работа трансформаторов вместо одного трансформатора суммарной мощности нужна по следующим соображениям:
· 1. Для обеспечения бесперебойного энергоснабжения потребителей в случае аварии в каком-либо трансформаторе или отключения его для ремонта.
· 2. Обеспечение работы трансформаторов с высокими эксплуатационными показателями (КПД и cos^), варьируя количество работающих трансформаторов, чтобы каждый из них был нагружен оптимально.
Для того, чтобы нагрузка между параллельно работающими однофазными трансформаторами распределялась пропорционально их номинальным мощностям, нужно выполнить следующих три условия:
· 1. Первичные и вторичные напряжения трансформаторов должны быть соответственно равны, т. е. трансформаторы должны иметь равные коэффициенты трансформации - к2 - к3 -
· 2. Трансформаторы должны иметь одну и ту же группу соединения обмоток.
· 3. Номинальные напряжения короткого замыкания трансформаторов должны быть равными ((/К1 = UK2 -UK3 = ...).
Вопрос 2 Образование ЭДС в обмотках. Электромагнитный момент машины постоянного тока(1.3 тот же вопрос но разобран женей)
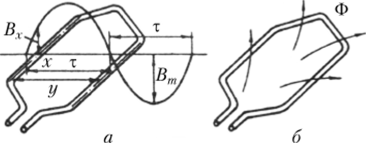
Рис. 1.67. Наведение ЭДС в витке
Электродвижущая сила в витке может наводиться при вращении витка в магнитном поле или при перемещении магнитного ноля относительно витка (рис. 1.67, а). Электродвижущая сила в витке наводится также, если неподвижный виток пронизывается изменяющимся во времени магнитным потоком (рис. 1.67, б). В общем случае ЭДС в витке наводится при пространственном перемещении поля и витка относительно друг друга, а также при изменении потока, сцепленного с витком, во времени.
Электродвижущая сила, обусловленная относительным перемещением витка и поля, называется ЭДС вращения. Электродвижущую силу, зависящую от изменения потока во времени, называют трансформаторной ЭДС.
Электродвижущую силу вращения можно определить по формуле, предложенной Фарадеем (см. рис. 1.67, а):
![]()
где /§ — активная длина витка; v — линейная скорость.
Электродвижущая сила секции (катушки), состоящей из нескольких витков,

где потокосцепление ![]()
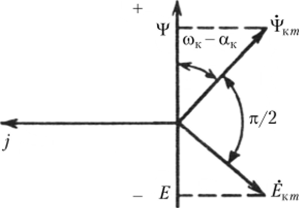
Рис. 1.68. ЭДС и потокосцепления на комплексной плоскости
Здесь Ч/кт — максимальное потокосцепление катушки (рис. 1.68). На комплексной плоскости потокосцепления и ЭД.С изображены векторами Фкш и Ёкт. Проекции этих векторов на действительную ось соответствуют мгновенным значениям потоко- сцеплений и ЭДС.
Электродвижущая сила, которая наводится в катушке, зависит
от выполнения катушки. В катушке, состоящей из витков с диаметральным шагом
(рис. 1.69, а), максимальный поток от 1-й гармоники индукции
равен 

Рис. 1.69. К определению ЭДС в катушке с диаметральным (а) и укороченным (б) шагами
Электродвижущая сила катушки

Действующее значение ЭДС катушки  На комплексной плоскости из формулы
(1.79)
На комплексной плоскости из формулы
(1.79)
![]()
где Вт — амплитуда индукции первой гармоники; 5 = /йт — площадь, пронизываемая потоком. Тогда ЭДС проводника
![]()
где амплитуда ЭДС
![]()
Так как
![]()
то

Для катушки с витками, имеющими укорочение (рис. 1.69, б),
![]()
где ky — коэффициент укорочения, который учитывает уменьшение ЭДС за счет укорочения шага витков катушки.
Электромагнитный момент машины постоянного тока
На проводник обмотки якоря, находящийся в магнитном поле, действует электромагнитная сила
![]() ,
,
где  – ток проводника, равный
току параллельной ветви. Подставив выражения для
– ток проводника, равный
току параллельной ветви. Подставив выражения для![]() и
и![]() получим
получим
 .
.
Сила, действующая на все проводники
![]() .
.
С учетом последних формул получим средний электромагнитный момент сил, действующих на якорь:
![]()
+где ![]() – коэффициент,
определяемый конструкцией машины.
– коэффициент,
определяемый конструкцией машины.
Электромагнитный момент МПТ прямо пропорционален магнитному потоку полюсов и току якоря. Это справедливо как для двигателя, так и для генератора.
Преобразование механической энергии в электрическую и электрическую в механическую сопровождается потерями энергии. Один из основных энергетических показателей МПТ – их КПД
 .
.
Ссылка на источник:
https://studme.org/275677/tehnika/navedenie_obmotkah_elektricheskih_mashin
https://studfile.net/preview/2140448/page:12/
Вопрос 3 Обмотки машин постоянного тока.(23.3 такой же вопрос)
Обмотки якорей машин постоянного тока делятся на простые и сложные. Обмотки, как правило, двухслойные, симметричные. Простые обмотки выполняются петлевыми и волновыми. Сложные состоят из двух-трех простых петлевых или волновых обмоток. Сложная обмотка, объединяющая простую петлевую и волновую обмотки, называется лягушечьей. В многообразных конструкциях машин постоянного тока встречаются и другие разновидности обмоток, но классификация, приведенная выше, охватывает основные виды обмоток машин постоянного тока. Следует иметь в виду, что основные соотношения в математических моделях процессов преобразования энергии практически не зависят от типа обмотки якоря.
На рис. 5.14, а —в представлены секции петлевой, волновой и лягушечьей обмоток.
Секции обмотки образуют катушки, которые укладываются в пазы (см. рис. 1.50). Катушка имеет общую пазовую изоляцию и состоит из одной или нескольких секций. Секция состоит из одного или нескольких витков, виток — из двух или нескольких проводников.
Секции образуют обмотку, которая может состоять из двух или нескольких параллельных ветвей. Каждая ветвь
Рис. 5.14. Секции обмоток машин постоянного тока имеет последовательно соединенные витки и проводники. Последовательно соединенные витки определяют напряжение, а параллельные ветви — ток машины. Общий объем меди при определенной плотности тока характеризует мощность машины постоянного тока.
Число элементарных пазов якоря совпадает с числом секций обмотки якоря и равно числу коллекторных пластин К.
В простой петлевой обмотке число параллельных ветвей 2а = 2р, в рассматриваемом случае равно 4. Число щеток равно числу полюсов.
В двухслойной обмотке одна сторона секции лежит на дне паза, а другая — в верхней части паза. Это хорошо видно па схеме рис. 5.16, которая иллюстрирует расположение секций в пазах якоря.
При наличии параллельных ветвей из-за несиммстрии воздушного зазора могут возникать уравнительные токи.
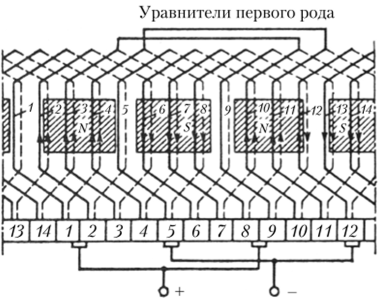
Рис. 5.15. Простая петлевая обмотка (z3 = k= 14, 2р = 4, г/, = 4, у2 = 3)

Рис. 5.16. Схема расположения секций в пазах для обмотки рис. 5.15
Эти токи, замыкаясь через щетки одной полярности, могут ухудшить коммутацию машины. Чтобы уравнительные токи не замыкались через щетки, применяют уравнительные соединения, которые соединяют равнопотенциальные точки обмотки (см. рис. 5.15). Технологически удобно уравнительные соединения выполнять, соединяя проводниками коллекторные пластины.
Для удобства на схеме обмотки показано соединение однопотенциальных точек со стороны лобовых частей обмотки, противоположных коллектору. Такие уравнительные соединения называются уравнительными соединениями первого рода. Следует отмстить, что уравнительные токи — токи переменные, так как они замыкаются в обмотке, минуя коллектор. Уравнительные токи создают вращающееся магнитное поле, неподвижное относительно обмотки возбуждения. Поле уравнительных токов уменьшает токи несимметрии, тем самым снижая влияние несимметрии на характеристики машины. Объем меди уравнительных соединений обычно составляет 20^-30% объема якорной обмотки.
На схеме обмотки видно, что секции, которые замыкаются щеткой, коммутируются, т.е. переходят из одной параллельной ветви в другую (от одного полюса к другому). Хотя щетки находятся под серединой полюса, коммутация секций происходит между полюсами в зоне коммутации.
При волновой обмотке обход якоря заканчивается на коллекторной пластине, находящейся слева или справа от пластины, с которой начиналось построение обмотки. Если при обходе происходит смещение па одну пластину влево (на пластину с меньшим номером), обмотка называется не- перекрещивающейся. В противном случае получается перекрещенная обмотка.
Шаг по коллектору простой волновой обмотки с числом коллекторных пластин К определяется как

Рис. 5.17. Волновая обмотка (z3 = k = 17, 2р = 4, г/( = 4, у2 = 4)
Знак «-» относится к неперекрещенной обмотке, а «+» — к перекрещенной.
Для волновой обмотки, показанной на рис. 5.17, 2р = 4, z — z3 — k — 17,

Схема простой неперекрещенной волновой обмотки приведена на рис. 5.17.
На рис 5.18 показана схема расположения секций в верхней и нижней частях пазов якоря.
Число параллельных ветвей в простой волновой обмотке 2а = 2 и не зависит от числа полюсов. Достоинством волновых обмоток является то, что они не требуют уравнительных соединений — сами секции обмотки являются уравнителями, так как стороны секций, соединенных последовательно, находятся на эквипотенциальных образующих цилиндра якоря (см. рис. 5.17).

Рис. 5.18. Расположение секций в пазах простой неперекрещенной волновой обмотки
Рис. 5.19. Расположение секций в пазах сложной петлевой обмотки (z.j - 20, 2р = 4, т = 2)
Сложные петлевые обмотки состоят из двух (редко из трех) простых петлевых обмоток. Шаг сложной обмотки у = = ук = 2 (при двух обмотках). Шаги у и у2 определяются так же, как и для простой обмотки. В пропущенные пазы укладывается вторая обмотка сложной петлевой обмотки (рис. 5.19) для 2р = 4, z = za = 20, т = 2 (две простые петлевые обмотки). Для сложной петлевой обмотки у = ук = 2, 2Э 20
У = ^ + 8 = J + 1 = 6, у2 = 6 - 2 - 4.
Ссылка на источник:
https://studme.org/231275/tehnika/obmotki_yakorey_mashin_postoyannogo_toka
Билет 14
Вопрос 1 Переходные процессы в трансформаторах.
При переходе трансформатора из одного установившегося режима в другой возникают переходные процессы. Так как каждый установившийся режим характеризуется определенным значением энергии электромагнитных полей, то в течение переходного процесса происходит изменение энергии этих полей. Наибольший практический интерес представляют переходные процессы при включении трансформатора и коротком замыкании на зажимах вторичной обмотки.
Включение трансформатора в сеть.
В этом случае результирующий магнитный поток можно рассматривать как сумму трех составляющих:
Ф = Фуст + Фпер ± Фост
где Фуст — магнитный поток установившийся; Фпев — магнитный поток переходного процесса; Фост — магнитный поток остаточного магнетизма, направленный либо согласно с установившимся потоком (знак «+»), либо встречно ему (знак «-»).
Магнитный поток переходного процесса затухающий и постоянен по направлению.

Рис. 4.1. Графики перехода процессов при включении трансформатора (а) и определение тока включения трансформа по кривой намагничивания (б)
Так как длительность переходного процесса невелика и не превышает нескольких периодов переменного тока, то ток включения для трансформатора не опасен. Однако его следует учитывать при регулировке аппаратуры защиты, чтобы в момент включения трансформатора не произошло его неправильного отключения от сети. Бросок тока включения следует также учитывать при наличии в цепи первичной обмотки трансформатора чувствительных измерительных приборов. Во избежание поломки этих приборов нужно до включения трансформатора в сеть шунтировать их токовые обмотки.
Внезапное короткое замыкание на зажимах вторичной обмотки трансформатора.
Оно возникает из-за различных неисправностей: механического повреждения изоляции или ее электрического пробоя при перенапряжениях, ошибочных действиях обслуживающего персонала и др. Короткое замыкание — это аварийный режим который может привести к разрушению трансформатора.
При внезапном коротком замыкании на зажимах вторичной обмотки в трансформаторе возникает переходный процесс, сопровождаемый возникновением большого мгновенного тока к.з. iк. Этот ток можно рассматривать как результирующий двух токовустановившегося тока iк.уст и тока переходного процесса iк.пер, постоянного по направлению, но убывающего по экспоненциальному закону.
![]()
Наиболее неблагоприятные условия к.з. могут быть в момент когда мгновенное значение первичного напряжения равно нулю (u1 = 0). На рис. 4.2 построена кривая тока к.з, iк для этого условия. Ток внезапного к.з. (ударный ток) может достигать двойного значения установившегося тока к.з. и в 20—40 раз превышать номинальное значение тока.
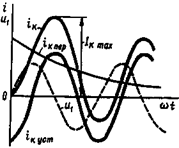
Рис. 4.2. Графики переходных процессов при внезапном к.з.
Переходный процесс при внезапном к.з. у трансформаторов малой мощности длится не более одного периода, а у трансформаторов большой мощности — 6—7 периодов. Затем трансформатор переходит в режим установившегося к.з., при этом в обмотках протекают токи iк.уст, значения которых хотя и меньше тока iк при переходном процессе, но все же во много раз превышают номинальное значение тока. Через несколько секунд срабатывают защитные устройства, отключающие трансформатор от сети. Но несмотря на кратковременность процесса к.з., он представляет собой значительную опасность для обмоток трансформатора: во-первых, чрезмерно большой ток к.з. резко повышает температуру обмотки, что может повредить ее изоляцию; во-вторых, резко увеличиваются электромагнитные силы в обмотках трансформатора.
Вопрос 2 Угловые характеристики СМ.
Угловая характеристика синхронного двигателя, так же как и для генератора, — это зависимость электромагнитной мощности Р или электромагнитного момента Мот угла рассогласования 0 (см. рис. 4.6.2), которая аналитически описывается выражением (4.6.3) или (4.6.4). Следует учитывать, что при переходе из генераторного в двигательный режим работы, как было отмечено в параграфе 4.9, изменяется знак угла 0, что приводит к изменению знака мощности и момента. Однако оперирование с отрицательными мощностями и моментами неудобно, поэтому они условно принимаются положительными.
Амплитуда угловой характеристики (Ммакс или Рмакс) характеризует перегрузочную способность синхронного двигателя или предел его статической устойчивости в синхронизме:

Перегрузочная способность зависит от напряжения сети и ЭДС ?0, т.е. от тока возбуждения ротора. Таким образом, перегрузочную способность двигателя можно регулировать током возбуждения. Номинальный момент двигателя соответствует углу рассогласования не более 30°. Поэтому перегрузочная способность синхронных двигателей всегда больше двух. У двигателей с резко переменным моментом сопротивления (для привода дробилок, поршневых насосов) она достигает 3,5.
Как все электродвигатели, синхронный двигатель обладает свойством саморегулирования: при изменении момента сопротивления на валу изменяется угол рассогласования 0 и электромагнитный вращающий момент становится равным моменту сопротивления. При этом изменяются активная мощность и ток статора двигателя. Однако частота вращения остается неизменной: механическая характеристика синхронного двигателя — зависимость п2(М) — представляет собой горизонтальный отрезок прямой линии.
На угловых характеристиках (рис. 4.10.1) значение момента сопротивления на валу показано горизонтальной линией. Ее пересечение с восходящими ветвями угловых характеристик, где возможна устойчивая работа синхронного двигателя, дают значения рабочих углов рассогласования 0. На нисходящих ветвях угловых характеристик, так же как и для генератора, устойчивая работа двигателя невозможна.
При большом токе ротора его магнитное поле становится сильнее, угол рассогласования полюсов уменьшается. Если уменьшить ток ротора, то момент сопротивления на валу может оказаться больше максимального электро-
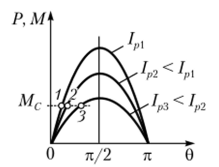
Рис. 4.10.1. Угловые характеристики синхронного двигателя
магнитного момента двигателя и ротор остановится. При этом ЭДС Е0 = О и ток статора резко увеличивается, так как 1= (JJ- Еф)/)Х.
На рис. 4.10.2 приведены две угловые характеристики М(0) для разных значений тока ротора /р, полученные на компьютерной модели синхронного двигателя (см. параграф 5.2). Каждая из угловых характеристик получена путем изменения тормозного момента при постоянном значении тока ротора. Результаты моделирования показывают, что амплитуда угловой характеристики увеличивается при повышении тока ротора.
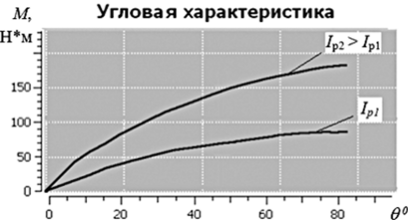
Рис. 4.10.2. Угловые характеристики синхронного двигателя (Модель)
Ссылка на источник:
https://studme.org/277299/tehnika/uglovye_harakteristiki_sinhronnogo_dvigatelya
Вопрос 3 АД в режимах генератора, электромагнитного тормоза.
Режим генератора
Режим генератора у асинхронных машин является полной противоположностью режиму двигателя. Самым главным отличием является то, что при режиме двигателя, асинхронная машина потребляет из сети электрическую энергию. А в режиме генератора наоборот отдает в сеть выработанную электрическую энергию.
Режим генератора возможен только тогда, когда скорость вращения ротора n будет выше скорости вращающегося магнитного поля статора. В этом случаи скольжение S будит отрицательным. Для этого необходимо ускорить ротор синхронной машины, то есть посадить на вал ротора, какой-либо механизм (турбина, редуктор, другой двигатель).
режим генератора
Допустим ротор мы разогнали до 3500 оборотов в минуту, а скорость
магнитного поля статора 3000 оборотов в минуту, определим скольжение:
Режим генератора у асинхронных машин не является часто используемым, и может применяться в узких специализированных областях, в маломощных электростанциях.
Стоит отметить, что при таком режиме работы, отдаваемая в сеть электроэнергия совпадает по частоте с частотой самой сети. Так как она зависит только от частоты вращения магнитного поля статора, которая как мы знаем не изменяется.
В использовании таких генераторов есть огромный плюс, в его устройстве отсутствуют скользящие контакты, вращающиеся обмотки, это обеспечивает надежную и долговременную эксплуатацию. Так же эти генераторы мало восприимчивы к коротким замыканиям в сети. Еще не маловажным условием работы является, наличие остаточной намагниченности ротора, которое усиливается конденсаторными установками, включенными в цепи статорных обмоток.

Ссылка на источник:
https://white-santa.ru/rejimi_raboti_-ad/
https://present5.com/elektricheskie-mashiny-elektricheskie-mashiny-generatory-dvigateli-mashiny/
Билет 15
Вопрос 1 Переходные процессы в трансформаторах.
При переходе трансформатора из одного установившегося режима в другой возникают переходные процессы. Так как каждый установившийся режим характеризуется определенным значением энергии электромагнитных полей, то в течение переходного процесса происходит изменение энергии этих полей. Наибольший практический интерес представляют переходные процессы при включении трансформатора и коротком замыкании на зажимах вторичной обмотки.
Включение трансформатора в сеть.
В этом случае результирующий магнитный поток можно рассматривать как сумму трех составляющих:
Ф = Фуст + Фпер ± Фост
где Фуст — магнитный поток установившийся; Фпев — магнитный поток переходного процесса; Фост — магнитный поток остаточного магнетизма, направленный либо согласно с установившимся потоком (знак «+»), либо встречно ему (знак «-»).
Магнитный поток переходного процесса затухающий и постоянен по направлению.
Рис. 4.1. Графики перехода процессов при включении трансформатора (а) и определение тока включения трансформа по кривой намагничивания (б)
Так как длительность переходного процесса невелика и не превышает нескольких периодов переменного тока, то ток включения для трансформатора не опасен. Однако его следует учитывать при регулировке аппаратуры защиты, чтобы в момент включения трансформатора не произошло его неправильного отключения от сети. Бросок тока включения следует также учитывать при наличии в цепи первичной обмотки трансформатора чувствительных измерительных приборов. Во избежание поломки этих приборов нужно до включения трансформатора в сеть шунтировать их токовые обмотки.
Внезапное короткое замыкание на зажимах вторичной обмотки трансформатора.
Оно возникает из-за различных неисправностей: механического повреждения изоляции или ее электрического пробоя при перенапряжениях, ошибочных действиях обслуживающего персонала и др. Короткое замыкание — это аварийный режим который может привести к разрушению трансформатора.
При внезапном коротком замыкании на зажимах вторичной обмотки в трансформаторе возникает переходный процесс, сопровождаемый возникновением большого мгновенного тока к.з. iк. Этот ток можно рассматривать как результирующий двух токовустановившегося тока iк.уст и тока переходного процесса iк.пер, постоянного по направлению, но убывающего по экспоненциальному закону.
![]()
Наиболее неблагоприятные условия к.з. могут быть в момент когда мгновенное значение первичного напряжения равно нулю (u1 = 0). На рис. 4.2 построена кривая тока к.з, iк для этого условия. Ток внезапного к.з. (ударный ток) может достигать двойного значения установившегося тока к.з. и в 20—40 раз превышать номинальное значение тока.
Рис. 4.2. Графики переходных процессов при внезапном к.з.
Переходный процесс при внезапном к.з. у трансформаторов малой мощности длится не более одного периода, а у трансформаторов большой мощности — 6—7 периодов. Затем трансформатор переходит в режим установившегося к.з., при этом в обмотках протекают токи iк.уст, значения которых хотя и меньше тока iк при переходном процессе, но все же во много раз превышают номинальное значение тока. Через несколько секунд срабатывают защитные устройства, отключающие трансформатор от сети. Но несмотря на кратковременность процесса к.з., он представляет собой значительную опасность для обмоток трансформатора: во-первых, чрезмерно большой ток к.з. резко повышает температуру обмотки, что может повредить ее изоляцию; во-вторых, резко увеличиваются электромагнитные силы в обмотках трансформатора.
Вопрос 2 Магнитные поля и основные параметры СМ
Магнитное поле СМ при холостом ходе
При холостом ходе магнитное поле создается током, протекающим по
обмотке возбуждения. Наибольший интерес представляет магнитное поле в воздушном
зазоре, так как от характера распределения этого поля зависит форма ЭДС обмотки
статора.
Картина магнитного поля в воздушном зазоре явнополюсной синхронной машины
представлена на рис. 5.3. Кривая распределения радиальной составляющей индукции
поля в воздушном зазоре имеет уплощенный характер. Для характеристики поля
вводится понятие коэффициента
формы поля ![]() , представляющего
отношение амплитуды основной гармоники
, представляющего
отношение амплитуды основной гармоники ![]() к индукции
поля на оси полюса
к индукции
поля на оси полюса ![]() ,
,
 .
.
Коэффициент формы поля ![]() является
сложной функцией геометрических размеров магнитной цепи на участке воздушного
зазора:
является
сложной функцией геометрических размеров магнитной цепи на участке воздушного
зазора:
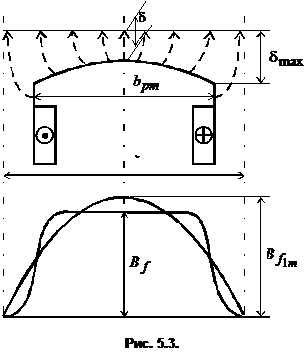
 .
.
Эта зависимость может быть получена на основе расчета магнитного поля при
холостом ходе.
При проектировании синхронных машин принимаются меры к тому, чтобы кривая
распределения индукции приближалась к синусоиде. Для этого ширину полюсного
наконечника ![]() принимают в
пределах
принимают в
пределах
![]()
Магнитное поле СМ при нагрузке
При нагрузке в обмотке якоря протекают симметричные токи, которые создают в воздушном зазоре вращающееся магнитное поле, неподвижное относительно поля обмотки возбуждения. Результирующее поле можно получить путем наложения поля якоря на поле возбуждения. Явления, связанные с изменением поля при нагрузке и влияющие па характеристики машины, называют реакцией якоря. Реакция якоря в синхронной машине зависит от нагрузки и cosфи нагрузки.
Рассмотрим реакцию якоря в генераторном режиме при активной нагрузке. При холостом ходе максимум кривой ЭДС в отдельных проводниках обмотки статора совпадает с серединой полюса. Можно считать с достаточной точностью, что при нагрузке и напряжение будет иметь максимум под серединой полюса, так как U ~ Е. При активной нагрузке cos <р = 1 и максимум тока совпадает с максимумом напряжения. Поле реакции якоря замыкается по полюсным наконечникам и магнитопроводу статора.
Магнитодвижущая сила поля реакции якоря при активной нагрузке направлена перпендикулярно направлению МДС обмотки возбуждения, действующей по продольной оси машины. Поэтому реакцию якоря при активной нагрузке принято называть поперечной реакцией якоря.
К основным параметрам синхронных генераторов относят: номинальные значения напряжения, силы тока нагрузки, мощности, силы тока возбуждения, коэффициента мощности, частоты.
1. Номинальное напряжение генератора соответствует одному из значений шкалы 230, 400, 690 В, 6,3 и 10,5 кВ. Следовательно, напряжение на зажимах генераторов принято на 5% выше стандартных напряжений токоприемников. Генераторы большей мощности изготавливают на напряжение от 3,15 до 24 кВ.
2. Номинальная сила тока нагрузки — это сила тока, на которую рассчитан тепловой режим генератора. Допускаются кратковременные перегрузки в аварийных режимах: на 10% продолжительностью 60 мин, на 15% — 15 мин, на 20% — 6 мин, на 25% — 5 мин, на 50% — 2 мин, на 100% — 1 мин. Более длительная перегрузка опасна для изоляции обмоток. Это относится и к току возбуждения.
3. Номинальная мощность — это длительно развиваемая мощность при номинальных значениях напряжения, силы тока и коэффициента мощности при номинальной нагрузке и температуре + 35 °С охлаждающего воздуха (входящего в генератор). Длительно допустимая температура нагрева обмоток указана в инструкции по эксплуатации генераторов. Она зависит от класса изоляции обмоток и в большинстве случаев должна превышать Ю0...120°С для статорных обмоток и 105...145°С для роторных.
4. Номинальный коэффициент мощности обычно равен 0,8. При боте генератора с меньшим коэффициентом мощности активная мощность его снижается, не полно используется мощность первичного двигателя.
5. Номинальная частота тока в нашей стране принята равной 50 Гц. В ряде установок применяют генераторы повышенной частоты (150, 200, 00 Гц и др.).
6. Заводы-изготовители прилагают к генераторам характеристики холостого хода и короткого замыкания. Эти характеристики необходимы в процессе проектирования и эксплуатации электростанций, в частности при решении вопросов об устойчивости параллельной работы синхронных генераторов, регулировании напряжения, а также при расчетах токов короткого замыкания в целях выбора необходимой релейной зашиты и т. д.
Параметры синхронной машины — это коэффициенты перед переменными в уравнениях, описывающих процессы преобразования энергии в синхронных машинах. Параметрами установившегося режима при симметричной нагрузке являются активные и индуктивные сопротивления обмоток статора и ротора.
Активные сопротивления фазы обмотки якоря, обмотки возбуждения и демпферной обмотки — сопротивления, которые определяются по электрическим потерям соответственно в обмотках якоря, возбуждения и демпферной обмотке. Увеличение сопротивления на переменном токе зависит от частоты тока и размеров элементарного провода. Чтобы уменьшить вытеснение тока, применяют транспозицию проводников и выбирают проводники меньшей высоты.
В явнополюсных машинах различают активные сопротивления демпферной обмотки по продольной и поперечной осям машины.
К индуктивным сопротивлениям синхронной машины в установившемся режиме относятся индуктивные сопротивления по продольной и поперечной осям, а также индуктивное сопротивление рассеяния фазы обмотки якоря.
При определении индуктивных сопротивлений предполагается существование рабочего потока, сцепленного с обмоткой якоря и обмоткой возбуждения Ф„„ и потока рассеяния Фст1, сцепленного только с обмоткой якоря.
В неявнополюсной машине главное индуктивное сопротивление якоря или сопротивление взаимной индукции якоря определяется по формуле

где L —
индуктивность обмотки якоря;
![]() — коэффициент проводимости
равномерного зазора на один полюс.
— коэффициент проводимости
равномерного зазора на один полюс.
Электродвижущая сила обмотки якоря от поля взаимной индукции якоря

В неявнополюсных машинах сопротивления в продольной и поперечной осях одинаковы. Индуктивное сопротивление рассеяния фазы обмотки якоря зависит от индуктивности рассеяния фазы якоря Laa:

Индуктивное сопротивление рассеяния определяется магнитными сопротивлениями полей рассеяния. Поток рассеяния замыкается в пазовой и лобовой частях обмотки.
Полное индуктивное сопротивление неявнополюсной синхронной машины
![]()
В явнополюсных машинах индуктивные сопротивления по продольной и поперечной осям машины отличаются друг от друга, так как магнитные сопротивления по продольной и поперечной осям машины из-за различия зазоров различны.
Индуктивное сопротивление по продольной оси
![]()
где xad — индуктивное сопротивление реакции якоря по продольной оси машины.
Индуктивное сопротивление но поперечной оси
![]()
Где xaq — индуктивное сопротивление реакции якоря в поперечной оси машины.
Электродвижущие силы, индуцируемые токами по продольной и поперечной осям, равны:

При холостом ходе ноток в воздушном зазоре Ф/т создается обмоткой возбуждения. Индуктивность обмотки возбуждения

Кроме поля в воздушном зазоре, существует поток рассеяния обмотки возбуждения. Полная индуктивность обмотки возбуждения
![]()
где Laj — индуктивность рассеяния обмотки возбуждения.
В переходных режимах

и Ly определяет время затухания тока в обмотке возбуждения при разомкнутых других контурах машины.
Активное сопротивление обмотки возбуждения определяется и рассчитывается по методике, изложенной в параграфе 1.15.
При испытаниях синхронных машин большой мощности проводить опыт скольжения трудно, так как надо иметь специальный приводной двигатель и обеспечивать питание машины соответствующими токами.
Вопрос 3 Асинхронный преобразователь частоты
Существует возможность использовать асинхронный двигатель с фазным ротором как асинхронный преобразователь частоты (АПЧ), так как известно частота тока ротора пропорциональна частоте тока статора, а коэффициент пропорциональности – скольжение. С помощью таких преобразователей из промышленной частоты 50 Гц обычно получают 100, 200 Гц.
![]()
Схема подключения АПЧ выглядит следующим образом
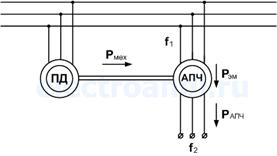
Статорная обмотка подключается к питающей сети с частотой тока f1. Ток с частотой f2 получают с концов обмотки ротора, где он передается через контактные кольца и щетки.
Для преобразования частоты необходим приводной двигатель (ПД), который механически связан с ротором АПЧ. Таким двигателем может быть асинхронный или синхронный двигатель, если требуется задать определенную частоту, а может быть двигатель постоянного тока, если требуется осуществлять плавную регулировку частоты тока.
Если ротор преобразователя вращать против направления вращения магнитного поля статора (то есть в режиме противовключения), то скольжение s>1, исходя из этого, частота получаемого тока будет больше частоты статора f2>f1. Если изменить направление вращения приводного двигателя, то скольжение s<1 (работа в двигательном режиме), а частота получаемого тока f2<f1.
Частоту f2 можно рассчитать по формуле
Коэффициент полезного действия такой системы не большой, так как он является произведением КПД приводного двигателя и асинхронного преобразователя частоты.
![]()
Билет 16
Вопрос 1 Включение ненагруженного трансформатора. Перенапряжение в трансформаторах
При включении ненагруженного трансформатора в сеть считаем, что подводимое напряжение синусоидально и магнитная система трансформатора не насыщена. Уравнение напряжения трансформатора

где u1, i1, Ф1 = (Ф + Фа1) — мгновенные значения напряжения, тока и полного потока.
Учитывая, что индуктивность первичной обмотки
![]()
уравнение можно переписать так:

где Ulm — амплитуда напряжения; i — угол, определяющий значение их в момент включения трансформатора (при t = 0).
По истечении полупериода после неблагоприятного включения трансформатора в сеть (|/ = 0) наибольшая величина потока примерно в два раза больше амплитуды установившегося потока.
Перенапряжение в трансформаторах
В нормальных условиях эксплуатации трансформатора между отдельными частями его обмоток, а также между обмотками и заземленными магнитопроводом и корпусом действуют синусоидальные напряжения номинальной частоты, не представляющие опасности для электрической изоляции. Однако периодически возникают условия, при которых между указанными элементами трансформатора появляются перенапряжения. В зависимости от причин, их порождающих, перенапряжения разделяются на два вида: внутренние и внешние.
Внутренние перенапряжения. Возникают либо в процессе коммутационных операций, например отключения или включения трансформатора, либо» в результате аварийных процессов (короткое замыкание, дуговые замыкания на землю и др.). Значение внутреннего перенапряжения обычно составляет (2,5 - 3,5) * UНОМ.
Внешние (атмосферные) перенапряжения. Обусловлены атмосферными разрядами: либо прямыми ударами молний в провода или опоры линий электропередач, либо грозовыми разрядами, индуцирующими в проводах линии электромагнитные волны высокого напряжения. Значение перенапряжения в этом случае может достигать нескольких тысяч киловольт.
Вопрос 2 Синхронные микромашины
Синхронные микромашины (мощностью от долей ватт до нескольких сотен ватт) широко применяют в качестве двигателей в устройствах автоматики. Характерной особенностью синхронных микродвигателей является то, что частота вращения их роторов жестко связана с частотой питания сети /j. Частота вращения ротора двигателя в синхронном режиме (при Mсопр < Мmах) не зависит от колебаний напряжения питания и момента сопротивления. Она равна частоте вращения магнитного поля, т.е. синхронной частоте вращения:
![]()
Поэтому их используют в различных устройствах, где требуется поддерживать постоянную частоту вращения (в электрических часовых механизмах, лентопротяжных механизмах самопишущих приборов и киноустановок, радиоаппаратуре и др.), а также в системах синхронной связи.
Синхронные микродвигатели выпускают в трех- и двухфазном исполнении. В отличие от обычных синхронных двигателей синхронные микродвигатели (СМД) не имеют обмотки возбуждения на роторе. В зависимости от типа ротора различают СМД с э/м возбуждением, постоянными магнитами, гистерезисные и реактивные.
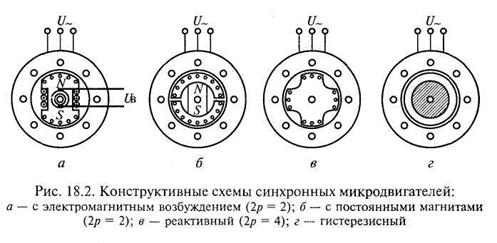
В ряде случаев синхронные микромашины применяют в качестве генераторов, например, для получения переменного тока повышенной частоты (индуктивные генераторы) и измерения частоты вращения вала (синхронные тахогенераторы).
Синхронные микродвигатели выпускаются как на промышленную частоту 50 Гц, так и на повышенные частоты 400, 500, 1000 Гц. Кроме обычных двигателей в схемах автоматики широко применяются тихоходные двигатели с электромагнитной редукцией частоты вращения, работающие на зубцовых гармониках поля, и двигатели с катающимся или волновым роторами. Иногда для получения низких частот вращения используются обычные двигатели со встроенными редукторами.
Вопрос 3 Холостой ход синхронных генераторов
Под холостым ходом автономного синхронного генератора понимается такой режим его работы, при котором ротор вращается приводным двигателем, а обмотка якоря разомкнута. В этом случае магнитное поле машины создается только током возбуждения. Это поле можно разложить на две составляющие: основное поле, магнитные линии которого проходят через воздушный зазор и сцепляются с обмоткой якоря, и поле рассеяния полюсов, магнитные линии которого сцепляются только с обмоткой возбуждения.
Магнитный поток основного поля при вращении полюсов индуктирует в обмотке якоря ЭДС. К этой ЭДС и к напряжению на выводах генератора предъявляется требование, чтобы их форма приближалась к синусоидальной. Это требование обусловлено тем, что при синусоидальных ЭДС и напряжении ток в якоре при линейном характере подключенной цепи также синусоидален. Вследствие этого суммарные потери в генераторе и у потребителей минимальны, так как отсутствуют добавочные потери от высших гармонических. Критерием для оценки кривой ЭДС служит коэффициент искажения синусоидальности этой кривой, под которым понимается выраженное в процентах отношение корня квадратного из суммы квадратов амплитудных (или действующих) значений высших гармонических составляющих данной кривой к амплитудному (или действующему) значению основной гармонической этой кривой:
где ν - порядок гармонической составляющей.
Важной характеристикой синхронной машины является характеристика холостого
хода. Она представляет собой зависимость ЭДС, индуктируемой в обмотке якоря, от
тока возбуждения при неизменной частоте вращения ротора. Эта характеристика
позволяет
оценить насыщение магнитной цепи машины и с ее
помощью построить векторные диаграммы и другие характеристики машины.
На рис. 22 показана схема для снятия характеристики холостого хода опытным путем. С помощью резистора Rв ток возбуждения изменяют от максимального значения до нуля, записывая при этом показания амперметра и вольтметра.
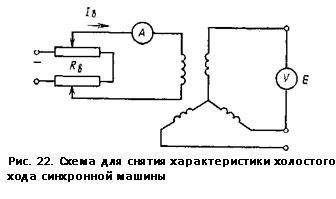 Опытная характеристика холостого хода показана на рис. 23
штриховой линией.
Опытная характеристика холостого хода показана на рис. 23
штриховой линией. 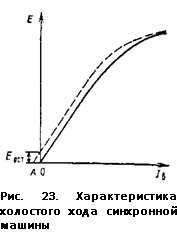
При токе возбуждения Iв =0 ЭДС от остаточного магнетизма Eост = (2÷3) %U1ном. При расчетах обычно используют характеристику холостого хода, которую получают, смещая опытную характеристику вправо на расстояние АО (сплошная линия).
Билет 17
Вопрос 1 Включение ненагруженного трансформатора. Перенапряжение в трансформаторах (как 16.1)
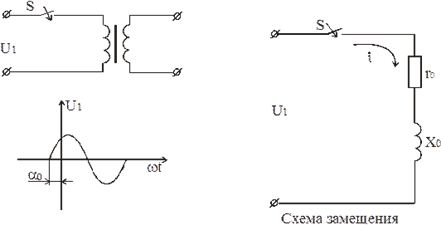
Процесс описывается следующими уравнениями:
![]() (8.1)
(8.1)
где a0 – фаза включения трансформатора.
В
уравнении (8.1) индуктивность L0 величина переменная, зависящая
от Ф0, поэтому введём в уравнение (8.1) переменную Ф0,
которую можно определить из формулы ![]() .
.
 ;
;  , (8.2)
, (8.2)
При этом получим
 (8.3)
(8.3)
Приближённое
решение можно получить, полагая L0 = пост. и  .
.
Решение дифференциального уравнения (8.3) имеет вид:
![]() , (8.4)
, (8.4)
где j0 –
фазовый угол между векторами напряжения и тока, равный .
Так как
wL0 ññ r0, то j0 » ![]() , то уравнение
(8.4) имеет вид:
, то уравнение
(8.4) имеет вид:
![]() , (8.5)
, (8.5)
При t = 0 поток Ф0 = + Фост., где Фост. – остаточный магнитный поток.
Фост. =
0,5Фm. (8.6)
Окончательно
![]() , (8.7)
, (8.7)
Наиболее благоприятные условия будут при α0=π/2 и Фост.=0. В этом случае
![]() , (8.8)
, (8.8)
т.е. с момента включения в трансформаторе установится номинальный магнитный поток.
Наиболее неблагоприятным будет включение трансформатора при α0=0 и противоположным по знаку потока Фост., тогда
![]() , (8.9)
, (8.9)
В этом случае через пол периода после включения поток достигает максимума.
![]() , (8.10)
, (8.10)
Перенапряжение в трансформаторах
Перенапряжение – любое увеличение напряженности электрического поля, в какой-либо части электроустановки или линии электропередачи, достигающее величины, опасной для состояния изоляции установки.
Перенапряжение может возникать между отдельными частями его обмоток, а также между обмотками и заземленными магнитопроводом
К причинам перенапряжения можно отнести два источника происхождения: внутреннего и внешнего происхождения.
Внутренние перенапряжения. Возникают, например при отключения или включения трансформатора, либо в результате аварийных процессов (короткое замыкание, дуговые замыкания на землю и др.). Значение внутреннего перенапряжения обычно составляет (2,5 ¸ 3,5)UНОМ.
Внешние (атмосферные) перенапряжения. Обусловлены атмосферными разрядами: либо прямыми ударами молний в провода или опоры линий электропередач, либо грозовыми разрядами, индуцирующими в проводах линии электромагнитные волны высокого напряжения:. Значение перенапряжения в этом случае может достигать нескольких тысяч киловольт.
Для защиты от атмосферных перенапряжений в трансформаторах с номинальным напряжением обмоток до 35 кВ используют усиленную изоляцию провода для первой и второй катушек в начале и в конце обмотки, а также увеличивают вентиляционные каналы между ними.
В трансформаторах с напряжением обмоток 110 кВ и выше применяют емкостную компенсацию. Для этого используют добавочные емкости, выполненные в виде экранов особой формы, которые окружают обмотку высшего напряжения.
Вопрос 2 СГ несимметричные внезапные кз. Действия токов в кз.


Действия токов к.з.
Можно выделить несколько последствий КЗ:
1. Термическое действие, которое оценивается следующим выражением:
![]() . (1.1)
. (1.1)
Термическое действие вызывает повреждение электрооборудования, связанное с его недопустимым нагревом токами КЗ.
2. Динамическое действие оценивается следующим условием:
![]() . (1.2)
. (1.2)
Динамическое действие может вызывать механическое повреждение электрооборудования из-за воздействия больших электромагнитных сил между токоведущими частями. Последствия термического и динамического действия в большей степени угрожают элементам системы, прилегающим к месту возникновения КЗ.
3. Отрицательные влияния на линии других напряжений и на линии связи (проявляется при несимметрии). При этом при несимметричных КЗ наводятся ЭДС в соседних линиях связи и сигнализации, опасные для обслуживающего персонала и оборудования.
4. Ухудшение показателей качества электрической энергии, таких как отклонение напряжения, несинусоидальность кривой напряжения и тока, несимметрия трехфазной системы и т.д. При этом ухудшаются условия работы потребителей.
5. Потеря устойчивости системы (выпадение генераторов из синхронизма). Данный вопрос рассматривается в курсе «Устойчивость узлов нагрузки».
Потеря устойчивости может привести к системной аварии. Это наиболее опасное последствие коротких замыканий. Оно приводит к значительным технико-экономическим ущербам и нарушениям электроснабжения регионов.
Вопрос 3 Специальные типы СМ.
1.Синхронные микродвигатели: -
синхронно – реактивные
- гистерезисные
- шаговые
2. Машины индукционных устройств синхронной связи:
Синхронные микродвигатели с электромагнитным возбуждением имеют наиболее оптимальные рабочие и пусковые характеристики , но практически не применяются в системах автоматики.
недостатки
для работы микродвигателя необходимо два источника питания: переменного и постоянного тока;
требуется специальная пусковая схема, отключающая на период разгона обмотку возбуждения ротора от источника постоянного тока и подключающая ее к внешнему сопротивлению.
Синхронными реактивными называют микродвигатели с переменным вдоль окружности воздушного зазора магнитным сопротивлением и невозбужденным ротором. Вращающееся магнитное поле таких микродвигателей создается только МДС статора.
Принцип действия синхронно – реактивного двигателя асинхронный метод.
Гистерезисный двигатель
Синхронным гистерезисным называют микродвигатель, вращающий момент которого возникает за счет явления гистерезиса при перемагничивании ротора
Достоинства гистерезисных двигателей
Гистерезисные микродвигатели обладают рядом ценных качеств. Они развивают большой пусковой момент. Ротор двигателя входит в синхронизм плавно, без рывков благодаря практически постоянному значению гистерезисного момента весь период разгона. Потребляемый двигателем ток незначительно (на 20-30%) изменяется при изменении режима работы от пуска до холостого хода, что позволяет эффективно использовать гистерезисные двигатели в повторнократковременном режиме.
Шаговые двигатели
Шаговыми называют синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота вала или фиксированное перемещение без датчиков обратной связи.
Принцип действия шагового двигателя
Наибольшее распространение получили ШД активного типа с ротором из постоянного магнита, выполненного в виде «звездочки» литой или составной конструкции.
В различных отраслях промышленности, в системах автоматики и контроля часто возникает необходимость синхронного и синфазного вращения или поворота двух и более осей, механически не связанных друг с другом. Такие задачи решаются с помощью систем синхронной связи. Различают два вида систем синхронной связи: синхронного вращения ("электрический вал"); и синхронного поворота ("передача угла").
Билет 18(фулл 2 билет)
Вопрос 1 Обмотки машин переменного тока. Э.Д.С. в обмотке обмоточный коэффициент.
Обмотки машин переменного тока можно разделить на три группы:
1) катушечные;
2) стержневые;
3) специальные;
К специальным обмоткам относятся:
а) короткозамкнутая обмотка в виде беличьей клетки;
б) обмотка асинхронного двигателя с переключением на разные числа полюсов;
в) обмотка асинхронного двигателя с противосоединеннями и т. д.
Кроме вышеуказанного деления, обмотки отличаются по ряду других признаков, а именно:
1) по характеру исполнения — ручные, шаблонные и полушаблонные;
2) по расположению в пазу — однослойные и двухслойные;
3) по числу пазов на полюс и фазу — обмотки с целым числом q пазов на полюс и фазу и обмотки с дробным числом q.
ЭДС в обмотке
Электродвижущая сила в обмотке электрической машины индуктируется только при условии изменения потокосцепления магнитного поля с витками катушки, что находит отражение в известном соотношении:
![]()
отражающем закон электромагнитной индукции. Потокосцепление может изменяться под действием различных причин.
При вращении витка в магнитном поле или при перемещении магнитного поля относительно неподвижного витка в нем индуктируется ЭДС, которую называют ЭДС вращения. При изменении во времени потока, сцепленного с неподвижным витком, в нем индуктируется так называемая трансформаторная ЭДС. Во всех случаях величина и характер изменения индуктируемой ЭДС определяется величиной и характером изменения потокосцепления и также параметрами витка.
Обмоточный коэффициент
Обмоточный коэффициент kоб учитывает уменьшение ЭДС pacпределенной обмотки по сравнению с ЭДС обмотки с тем же числом витков, но имеющих диаметральный шаг и сосредоточенных в одной катушке на каждом полюсе.
Для любой обмотки kоб может быть найден по векторной диаграмме ЭДС проводников (звезде пазовых ЭДС) как отношение геометрической суммы векторов ЭДС проводников, последовательно соединенных в фазу обмотки (ЭДС фазы), к алгебраической сумме ЭДС этих же проводников [5]:
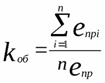 (3.3)
(3.3)
где епр — ЭДС эффективного проводника; n — число последовательных эффективных проводников обмотки.
Вопрос 2 Энергетическая диаграмма АД. Уравнение рабочего процесса в АМ.
При работе двигателя неизбежно происходит потеря преобразуемой им энергии, поэтому мощность, развиваемая на валу двигателя Р2 всегда будет меньше потребляемой им из сети мощности Р1.
Процесс преобразования энергии и потери, происходящие при работе двигателя, можно иллюстрировать энергетической диаграммой (рис. 36.1).
Потребляемая двигателем мощность из сети P1частично расходуется на покрытие потерь в обмотках статора Рм1 и в стали сердечника статора Рс1 на гистерезис и вихревые токи.
Оставшаяся часть мощности Рэм называемая электромагнитной, передается ротору через воздушный зазор вращающимся магнитным полем.
Рис.36.1. Энергетическая диаграмма асинхронного двигателя
Энергия, полученная ротором, преобразуется в механическую и частично расходуется на покрытие потерь в роторе.
На диаграмме показано, что электромагнитная мощность, поступающая на ротор, может быть представлена в виде суммы двух мощностей: Рэм= Р2’+ Pм2.
где Р2’— мощность, развиваемая вращающимся ротором,
Pм2— потери в меди обмоток ротора
Процессы, протекающие в асинхронной машине с эквивалентным неподвижным ротором, описываются системой уравнений, подобной системе уравнений для трансформатора (см. гл.3).
В асинхронной машине первичной обмоткой является обмотка статора, а вторичной – обмотка ротора.
Уравнения рабочего процесса в АМ.
Уравнение напряжения обмотки статора
![]() ,
(2.8)
,
(2.8)
где U1 — напряжение, подводимое к обмотке статора; Е1— ЭДС, наводимая в обмотке статора; Z1=r1+jx1 — комплексное сопротивление обмотки статора, состоящее из активного сопротивления обмотки статора r1и ее индуктивного сопротивления рассеяния x1; I1 — ток в обмотке статора.
Уравнения напряжения эквивалентного неподвижного ротора
![]() , (2.9)
, (2.9)
где Z2э = r2/s+jx2.; Z2 = r2 + jx2 – полное сопротивление обмотки неподвижного ротора.
Уравнение МДС
![]() .
(2.10)
.
(2.10)
С учётом ( ) уравнение (2.10) запишем в виде

После преобразований получим уравнение для токов
 ,
(2.11)
,
(2.11)
где  .
.
Электродвижущие силы Е1и Е2 индуцируются в обмотках асинхронной машины основным потоком Ф, являющимся потоком взаимной индукции. Этот поток создается результирующей МДС F12. Результирующей МДС F12 пропорционален ток I12, который согласно (2.11) можно считать составляющей тока статора I1:
 (2.12)
(2.12)
Вопрос 3 Характеристика ХХ.
Характеристика
холостого хода представляет собой зависимость напряжения генератора U от тока
возбуждения при постоянном числе оборотов п в токе якоря = 0: U = f(IB).
Характеристика холостого хода имеет две ветви — восходящую и нисходящую (рис.
299). Остаточный магнетизм полюсов и ярма при отсутствии возбуждения
обусловливает некоторое напряжение, обычно равное 2-3% UH.
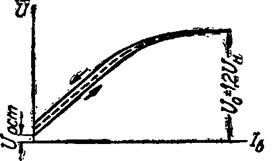
Рис. 299. Характеристика холостого хода.
Нисходящая
ветвь из-за остаточного магнетизма проходит несколько выше восходящей.
Характеристика холостого хода позволяет судить о магнитных свойствах машины, во
многом определяет другие характеристики, являющиеся как бы производными от нее.
Билет 19
Вопрос 1 Линейные, дуговые, электрические машины
Устройство линейного (а) и дугового (б) асинхронных двигателей показано на рис. Магнитопровод статора 1 линейного двигателя имеет форму параллелепипеда, дугового двигателя — дугового сектора. Разноименнополюсная трехфазная первичная обмотка 2 размещается в линейном двигателе в пазах на одной из граней параллелепипеда, в дуговом двигателе — в пазах на внутренней (или внешней) цилиндрической поверхности дугового сектора. Подвижная часть в линейном двигателе перемещается поступательно. Ее магнитопровод 4, как и магнитопровод статора, имеет форму параллелепипеда (рис. , а). В пазах на поверхности подвижного магнитопровода, обращенной к статору, размещается короткозамкнутая обмотка 3. Подвижная часть в дуговом двигателе вращается. Она называется, как и в обычном двигателе, ротором. Ротор 4 имеет форму полого цилиндра (рис., б). В пазах на его наружной цилиндрической поверхности размещается короткозамкнутая обмотка 3. Как в линейном, так и в дуговом двигателе подвижная часть может быть выполнена массивной из магнитного материала. Причем в этом случае отпадает необходимость в короткозамкнутой обмотке, а иногда в качестве ротора удается использовать цилиндрические массивные детали рабочей машины.
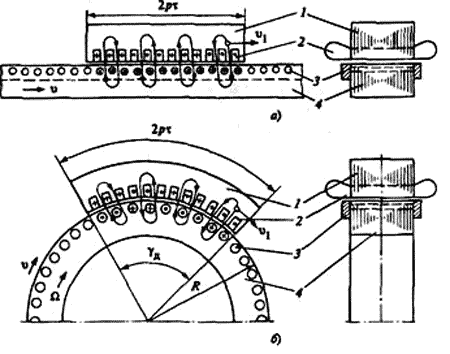
Рабочие свойства двигателей в зависимости от исполнения подвижной части аналогичны свойствам двигателя либо с короткозамкнутым ротором, либо с массивным ротором. Однако энергетические показатели линейных и дуговых двигателей хуже, чем у машин с кольцевым статором. Объясняется это тем, что в этих двигателях возникают краевые эффекты, так как их статоры не замкнуты в кольцо.
Линейные асинхронные машины можно использовать для получения возвратно-поступательного движения за счет периодического изменения чередования фаз обмотки статора, например, в металлообрабатывающих станках. В этом случае длина подвижной части должна быть больше длины неподвижной на требуемое перемещение. Однако из-за существенного увеличения массы перемещающейся детали станка за счет массы подвижной части двигателя, а также энергии, бесполезно теряемой в каждом цикле ускорения и торможения, такие линейные двигатели заметного распространения не получили. Более перспективно использование линейных двигателей в электрической тяге, в особенности для высокоскоростного транспорта. На рис. 12 показана возможная схема применения линейного асинхронного двигателя на электровозе. Магнитопровод статора 1 вместе с многофазной обмоткой 2 укреплен на электровозе и присоединен к сети переменного тока. Образуется бегущее поле, взаимодействующее с массивным ферромагнитным телом — рельсом 3 и стремящееся увлечь его за собой. Но так как рельс неподвижно закреплен, приходит в движение со скоростью v статор вместе с электровозом. Дуговые машины применяются в тех случаях, когда ротор требуется привести во вращение со сравнительно небольшой угловой скоростью.
Тяговый линейный двигатель
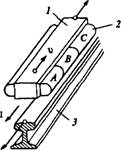
Действительно, статор дуговой машины, имеющий число периодов р и
занимающий дугу с центральным углом уд (рис. 1, б), создает на радиусе R поле,
вращающееся с линейной скоростью.
Применение дугового двигателя особенно выгодно при использовании в качестве
ротора массивного ферромагнитного цилиндра, являющегося частью машины,
потребляющей механическую энергию.
https://leg.co.ua/info/elektricheskie-mashiny/lineynye-i-dugovye-asinhronnye-dvigateli.html
Вопрос 2 Условия устойчивости работы электродвигателя. ПТ
При работе двигателя всегда возникают определенные возмущения режима работы (кратковременные колебания напряжения сети, случайные кратковременные изменения момента нагрузки на валу и так далее). Такие возмущения чаще всего бывают небольшими и кратковременными, однако при этом происходят, хотя также небольшие и кратковременные, нарушения равенства моментов установившегося режима работы , вследствие чего возникает момент Mдин и изменяется скорость вращения.
Под устойчивостью работы двигателя понимается его способность вернуться к исходному, установившемуся режиму работы при малых возмущениях, когда действие этих возмущений прекратится. Иными словами, работа двигателя называется устойчивой, если бесконечно малые в пределе возмущения его работы вызывают лишь столь же малые изменения величин, характеризующих режим его работы, например скорости вращения, тока якоря и так далее. Двигатель неустойчив в работе, если подобные малые возмущения приводят к большим изменениям режима работы. При неустойчивой работе небольшие кратковременные возмущения вызывают либо непрерывное изменение режима (n, Iа и так далее) в каком-либо одном направлении, либо приводят к колебательному режиму с возрастанием амплитуд колебаний n, Iа и так далее. Естественно, что в условиях эксплуатации необходимо обеспечить устойчивый режим работы двигателя. При неустойчивости двигателя нормальная его работа невозможна, и обычно происходит авария.
Устойчивость работы двигателя зависит от вида его механической характеристики M = f(n) и от вида зависимости момента сопротивления на валу от скорости вращения Mст = f(n). Вид последней зависимости определяется свойствами рабочей машины, приводимой в движение двигателем. Например, у металлорежущих станков, если установка резца не изменяется, Mст ≈ const, то есть Mст не зависит от скорости вращения, а у вентиляторов и насосов Mст ∼ nв квадрате.
|
|
|
Рисунок 1. Устойчивый (а) и неустойчивый (б) режим работы двигателя |
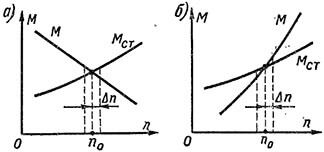
На рисунке 1, а и б изображены два характерных случая работы двигателя. Установившемуся режиму работы (M = Mст) со скоростью вращения n0 соответствует точка пересечения указанных двух характеристик.
Если зависимости M = f(n), и Mст = f(n) имеют вид, изображенный на рисунке 1, а, то при случайном увеличении n в результате возмущения на Δn тормозной момент Mст станет больше движущего M (Mст > M) и поэтому двигатель будет затормаживаться, что заставит ротор вернуться к исходной скорости n0. Точно так же, если в результате возмущения скорость двигателя уменьшится на Δn, то будет Mст < M, поэтому ротор станет ускоряться и снова будет n = n0. Таким образом, в рассматриваемом случае работа устойчива. Как следует из рисунка 1, а, при этом
|
|
(2) |
что и является признаком, или критерием, устойчивости работы двигателя.
При зависимостях M = f(n) и Mст = f(n) вида рисунка 1, б работа неустойчива. Действительно, при увеличении n от n = n0 до n = n0 + Δn будет M > Mст, возникнет избыток движущего момента, скорость n начнет нарастать, причем избыточный момент M – Mст увеличится еще больше, n еще возрастет и так далее. Если в результате возмущения n = n0 – Δn, то M < Mст и n будет непрерывно уменьшаться. Поэтому работа в точке M = Mст и n = n0 невозможна. Как следует из рисунка 1, б, в этом случае
|
|
(3) |
что является признаком неустойчивости работы двигателя.
Из изложенного следует, что двигатель с данной механической характеристикой M = f(n) может работать устойчиво или неустойчиво в зависимости от характеристики Mст = f(n) рабочей машины. Возникновение неустойчивости наиболее вероятно при такой механической характеристики двигателя M = f(n) или n = f(M), когда M и n увеличиваются или уменьшаются одновременно (рисунок 1, б). В частности, в этом случае работа неустойчива при Mст = f(n) = const (например, металлорежущие станки). Поэтому двигателей с такими механическими характеристиками не строят.
Вопрос 3 Опыт холостого хода и короткого замыкания трансформатора
1. Опыт холостого хода. Холостым ходом
трансформатора называется такой режим его работы, при котором первичная обмотка
включена на номинальное напряжение ![]() , а вторичная
обмотка разомкнута
, а вторичная
обмотка разомкнута
|
|
|
Схема опыта холостого хода |

Режим холостого хода позволяет опытным путем установить следующие характерные для трансформатора величины: а) коэффициент трансформации; б) ток холостого хода; в) потери мощности в стали.
Коэффициент трансформации трансформатора
 ,
,
где ![]() и
и![]() – число витков
обмоток.
– число витков
обмоток.
Мощность ![]() определяет
затраты энергии в пределах трансформатора. Она приблизительно равна потерям в
стали, поскольку потери в стали независимы от нагрузки трансформатора, так как
при работе трансформатора магнитный поток почти не меняется. Поэтому
определяет
затраты энергии в пределах трансформатора. Она приблизительно равна потерям в
стали, поскольку потери в стали независимы от нагрузки трансформатора, так как
при работе трансформатора магнитный поток почти не меняется. Поэтому![]() при любой
нагрузке.
при любой
нагрузке.
При холостом ходе  . Коэффициент
мощности нагруженного трансформатора в основном зависит от коэффициента
мощности нагрузки. При холостом ходе
. Коэффициент
мощности нагруженного трансформатора в основном зависит от коэффициента
мощности нагрузки. При холостом ходе![]() обычно не
превышает 0,2…0,3.
обычно не
превышает 0,2…0,3.
2. Опыт короткого замыкания. Короткое замыкание трансформатора – испытательный режим, при котором вторичная обмотка замкнута накоротко, а в первичную включено такое пониженное напряжение, чтобы ток первичной обмотки был равен номинальному. Это напряжение, называемое напряжением короткого замыкания, является одной из постоянных, характеризующих трансформатор. Обычно оно составляет 5…10 % номинального напряжения.
|
|
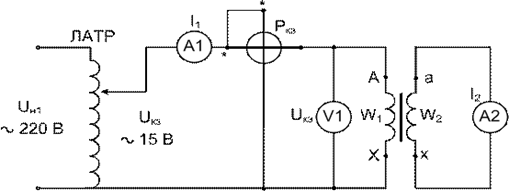
Потери в обмотках трансформатора определяются с помощью опыта короткого замыкания.
Мощность, затраченная при коротком
замыкании, почти целиком расходуется на нагревание обмоток трансформатора. По
мощности потерь при коротком замыкании можно рассчитать потери в обмотках при
любой нагрузке трансформатора. Для этого потери при замыкании ![]() относят к току
только первичной обмотки и некоторому условному сопротивлению
относят к току
только первичной обмотки и некоторому условному сопротивлению![]() , выражающему
пропорциональность между током и мощностью:
, выражающему
пропорциональность между током и мощностью:
![]() ;
; ![]() .
.
Тогда потери в обмотках, или потери в
меди ![]() , при любой
нагрузке находятся из значения тока
, при любой
нагрузке находятся из значения тока![]() первичной
обмотки:
первичной
обмотки:![]() .
.
Также потери в меди можно определить, используя коэффициент загрузки
 ;
;  .
.
Коэффициент полезного действия трансформатора рассчитывается из соотношения мощностей, приложенных ко вторичной и первичной обмоткам:
![]() ,
,
где ![]() – потери
мощности в трансформаторе.
– потери
мощности в трансформаторе.
Билет 20
Вопрос 1 Работа машины постоянного тока под нагрузкой.
Как и все электрические машины, машина постоянного тока обратима. Она работает в режиме генератора, если ее якорь вращается первичным двигателем, главное магнитное поле возбуждено, а цепь якоря соединена через щетки с приемником. При таких условиях под действием ЭДС, индуктируемой в обмотке якоря, в замкнутой цепи якорь — приемник возникает ток, совпадающий с ЭДС по направлению.
Взаимодействие тока якоря с главным магнитным полем создает на валу генератора тормозной момент, который преодолевается первичным двигателем. Генератор преобразует механическую энергию в электрическую.
В двигательном режиме цепи якоря и возбуждения машины присоединены к источнику электроэнергии. Взаимодействие тока якоря с главным магнитным полем создает вращающий момент. Под действием последнего вращающийся якорь преодолевает момент нагрузки на валу. Двигатель преобразует электрическую энергию в механическую. При этом ЭДС якоря противодействует току в цепи якоря и направлена ему навстречу.
Возбуждение главного магнитного поля возможно с помощью либо электромагнитов, либо постоянных магнитов.
Все рабочие характеристики машин постоянного тока при работе как в режиме генератора, так и в режиме двигателя зависят от способа включения цепи возбуждения по отношению к цепи якоря. Соединение этих цепей может быть параллельным, последовательным, смешанным.
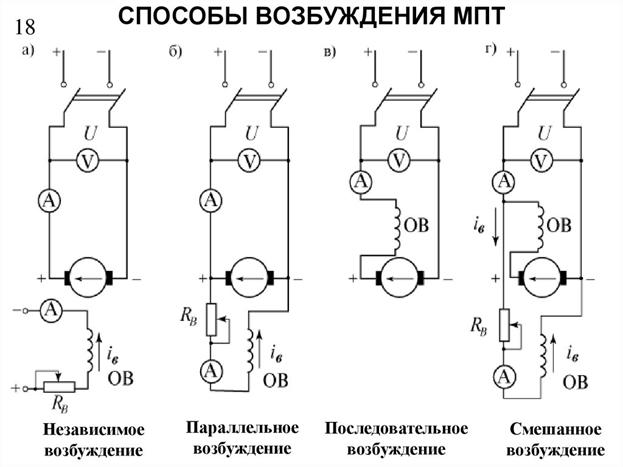
У машин с параллельным возбуждением цепь обмотки возбуждения соединяется параллельно с цепью якоря.
У машин с последовательным возбуждением ток якоря /я равен току обмотки возбуждения, поэтому она выполняется проводом большого сечения.
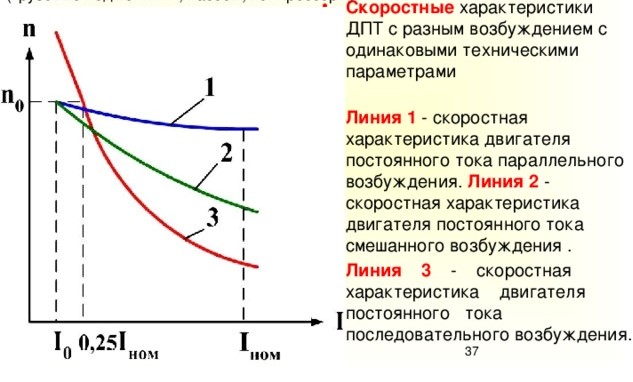
В машинах со смешанным возбуждением на каждом полюсном сердечнике расположены две обмотки. Одна из этих обмоток с числом витков wuap подключена параллельно якорю, вторая обмотка с числом витков wuoc — последовательно
Вопрос 2 Конденсаторные АД.
Статор асинхронного конденсаторного двигателя имеет в своей конструкции две обмотки с равным количеством пазов и сдвинутых относительно друг друга на 90 градусов. Одну из обмоток является главной и включается непосредственно в однофазную сеть, а вторая обмотка является в данном случае вспомогательной и включают в эту же сеть через рабочий конденсатор Сраб.
 ,
,
· где Сраб – емкость рабочего конденсатора, Ф,
· IA — ток обмотки A, А,
· IB — ток обмотки B, А,
·
![]() - угол
фазового сдвига между током IA и напряжением питания U при
круговом вращающемся поле, градусов,
- угол
фазового сдвига между током IA и напряжением питания U при
круговом вращающемся поле, градусов,
· U - напряжение питания сети, В,
· f - частота сети, Гц,
· k - коэффициент, определяемый отношением эффективных чисел витков в обмотках фаз статора B и A.
Более широкое распространение получили асинхронные конденсаторные двигатели, работающие от однофазной сети переменного тока. В этом двигателе одна из обмоток статора, называемая главной, включается непосредственно в однофазную сеть, а другая — вспомогательная, включается в эту же сеть, но через рабочий конденсатор.
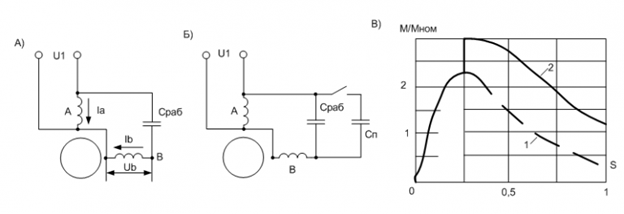
а — с рабочей емкостью,
б — с рабочей и пусковой емкостями,
в — механические характеристики;
1 — при рабочей емкости,
2 — при рабочей и пусковой емкостях
Асинхронные конденсаторные двигатели обладая достаточно высокими коэффициентом полезного действия и коэффициентом мощности (соs φ = 0,80 ÷ 0,95) имеют неудовлетворительные пусковые свойства, так как емкость Сраб обеспечивает круговое поле лишь при расчетной нагрузке, а при пуске двигателя поле статора эллиптическое. Пусковой момент при этом не превышает 0,5 Нм.
Конденсаторные двигатели иногда называют двухфазными, так как обмотка статора этого двигателя содержит две фазы. Двухфазные двигатели могут работать и без конденсатора или другого ФЭ, если к фазам обмотки статора подвести двухфазную систему напряжений.
Пусковой момент конденсаторного двигателя может быть значительно повышен, если параллельно рабочей емкости Сраб кратковременно включить пусковую емкость Спуск.
Емкость пускового конденсатора намного больше емкости рабочего конденсатора. Выбор величины пусковой емкости зависит от необходимой кратности пускового момента, которая может быть доведена до двух и более.
Значительные габариты конденсаторов, используемых в качестве пусковой емкости, иногда ограничивают применение конденсаторных двигателей с пусковой емкостью.
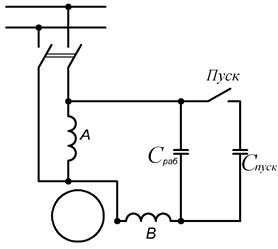
Вопрос 3 Определение рабочих характеристик АД по круговой диаграмме.
При изменении нагрузки асинхронной машины, но при ![]() и постоянных параметрах
и постоянных параметрах ![]() конец вектора тока
конец вектора тока ![]() перемещается по окружности. Эту окружность,
являющуюся геометрическим местом концов векторов тока
перемещается по окружности. Эту окружность,
являющуюся геометрическим местом концов векторов тока ![]() , вместе с дополнительными построениями,
необходимыми для ее исследования, называют круговой диаграммой асинхронной
машины.
Круговая диаграмма может быть использована для
определения рабочих характеристик асинхронной машины при условии, что ее параметры
в исследуемых режимах остаются постоянными.
, вместе с дополнительными построениями,
необходимыми для ее исследования, называют круговой диаграммой асинхронной
машины.
Круговая диаграмма может быть использована для
определения рабочих характеристик асинхронной машины при условии, что ее параметры
в исследуемых режимах остаются постоянными.
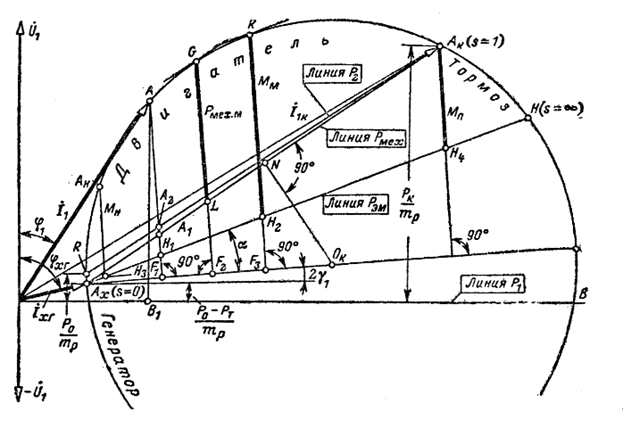
а) Построение
круговой диаграммы по опытным данным производится на основании двух опытов -
холостого хода и короткого замыкания.
Для построения круговой диаграммы асинхронного двигателя,
соответствующей Г-образной схеме замещения, , необходимы следующие данные:
фазные токи холостого хода (![]() ) и короткого замыкания (
) и короткого замыкания (![]() ); разность между потерями холостого хода
и механическими потерями (
); разность между потерями холостого хода
и механическими потерями (![]() ); потери короткого замыкания (
); потери короткого замыкания (![]() );При построении предполагается, что токи
идеального (s = 0) и реального холостого хода одинаковы.
);При построении предполагается, что токи
идеального (s = 0) и реального холостого хода одинаковы.
Круговая
диаграмма строится в следующем порядке:
Выбирается
масштаб тока ![]() , А/мм, из соображений удобства построения
диаграммы/
, А/мм, из соображений удобства построения
диаграммы/
Определяется масштаб
мощности ![]() , Вт/мм.
, Вт/мм.
Вертикально вверх откладывают вектор ![]() , cтроят точку
, cтроят точку ![]() идеального холостого хода (s=0) по
току
идеального холостого хода (s=0) по
току ![]() и потерям
и потерям ![]() . Строят точку
. Строят точку ![]() короткого замыкания (s=1) по
току
короткого замыкания (s=1) по
току ![]() и потерям Рк. Из точки N - середины
отрезка
и потерям Рк. Из точки N - середины
отрезка ![]() - восстанавливают к нему перпендикуляр,
который пересекает в точке Ок линию
- восстанавливают к нему перпендикуляр,
который пересекает в точке Ок линию ![]() проведенную через
точку
проведенную через
точку ![]() под углом
под углом ![]() к горизонтали;
к горизонтали;
Точка Ok является центром окружности токов, радиус
которой равен ![]() .
.
Для определения точки Н, соответствующей ![]() , проводят прямую
, проводят прямую ![]() под углом a к диаметру
под углом a к диаметру ![]() ;
;
![]()
где ![]() - диаметр круговой диаграммы в амперах.
- диаметр круговой диаграммы в амперах.
Точки Аx, Ак и Н делят окружность токов на три части,
соответствующие режимам работы двигателем, генератором и тормозом.
Точка R реального холостого хода расположена на диаграмме
несколько выше точки Ах идеального холостого хода.
б) Построение круговой диаграммы по расчетным данным (рис.
16-43) производится на основании известных параметров ![]() , определенных с учетом вытеснения тока, и
параметров
, определенных с учетом вытеснения тока, и
параметров ![]() , определенных без учета насыщения и
вытеснения тока.
, определенных без учета насыщения и
вытеснения тока.
Диаметр окружности токов
![]() , где
, где ![]() .
.
Ток холостого хода при s=0
Коэффициент мощности при s=0
в) Определение по круговой диаграмме величин, характеризующих
режим нагрузки машины.
Линия первичной мощности ![]() .
.
Линия электромагнитной мощности (Рэм) или линия
электромагнитного момента ![]() .
.
Линия механической мощности ![]() .
.
Линия вторичной мощности ![]() .
.
Масштабы: тока ![]() , А/мм; мощности
, А/мм; мощности ![]() , Вт/мм; момента
, Вт/мм; момента ![]() (или
(или ![]() ).
).
Для режима нагрузки, соответствующего некоторой точке А на
круговой диаграмме:
ток статора ![]() , А;
, А;
ток ротора ![]() , А;
, А;
первичная мощность ![]() , Вт;
, Вт;
электромагнитная мощность ![]() , Вт;
, Вт;
электромагнитный момент ![]() ;
;
механическая мощность ![]() ,Вт;
,Вт;
полезная (вторичная) мощность ![]() , Вт;
, Вт;
коэффициент мощности ![]()
КПД ![]()
скольжение ![]()
г) Определение по круговой диаграмме максимального момента,
максимальной мощности, перегрузочной способности и кратности пускового
момента (рис. 16-43).
Максимальный электромагнитный момент ![]() , где
, где ![]() - отрезок
перпендикуляра
- отрезок
перпендикуляра ![]() к диаметру
к диаметру ![]() , опущенного из точки К касания окружности
касательной, проведенной параллельно линии электромагнитного момента
, опущенного из точки К касания окружности
касательной, проведенной параллельно линии электромагнитного момента ![]() .
.
Билет 21(Попов его потерял)
Билет 22
Вопрос 1 Классы коммутации.

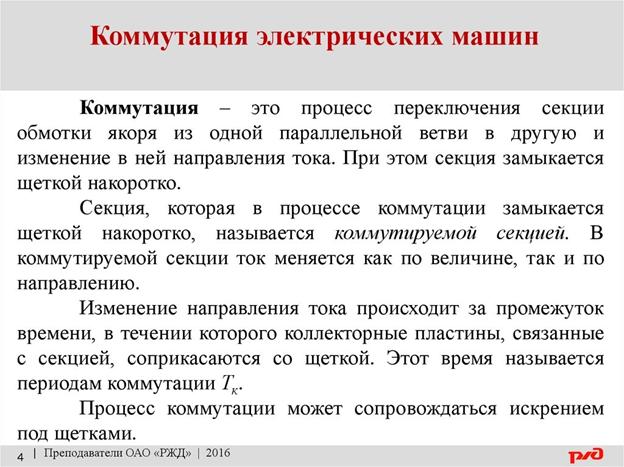
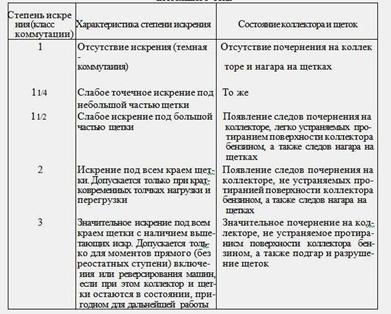
Вопрос 2 Виды обмоток АД, виды пазов статора и ротора.
виды обмоток АД
Важная составная часть электродвигателей - ее обмотки, в которых происходят основные рабочие процессы по преобразованию энергии. В наиболее распространенных типах электрических машин можно выделить:
1. трехфазные обмотки машин переменного тока, используемые обычно в статорах трехфазных асинхронных и синхронных машин, а также в роторах асинхронных двигателей с контактными кольцами.
2. однофазные обмотки статоров асинхронных однофазных двигателей с короткозамкнутым ротором.
3. обмотки якорей коллекторных машин постоянного и однофазного переменного тока.
4. короткозамкнутые обмотки роторов асинхронных электродвигателей.
5. обмотки возбуждения синхронных и коллекторных машин.
Способы изображения обмоток электрических машин достаточно условны и своеобразны. Обмотки содержат большое число проводников, и изобразить все соединения и проводники на чертеже практически невозможно. Поэтому приходится прибегать к изображению обмоток в виде схем.
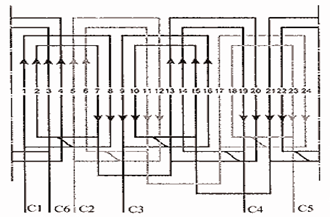
Рис. 2.1. Развернутая схема трехфазной однослойной концентрической обмотки с z = 24, 2р = 4.
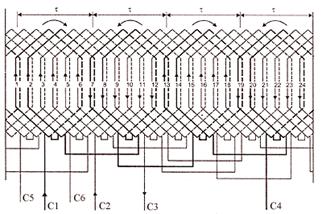
Рис. 2.4. Развернутая схема двухслойной обмотки при z = 24, 2р = 4, q = 2.
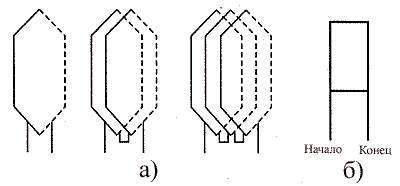
Рис. 2.5. Изображение катушечных групп на схемах: а - развернутой, б – условной.
виды пазов статора и ротора
Различают пазы статора — полузакрытые (рис. 82, а, б, в), полуоткрытые (рис. 82г), открытые (рис. 82д) и ротора — закрытые (рис. 82, е, ж, з) и полузакрытые (рис. 82, и—м).

Рис. 82. Форма пазов статора (а, б, в — полузакрытые,
г — полуоткрытые, д — открытые) и
ротора (е, ж, з — закрытые, и - м — полузакрытые)
Полузакрытые пазы статора применяют для расположения в них круглого провода и поэтому шлиц (Шлиц — паз на валу, в который входит зуб сопряжённой детали, образуя шлицевое соединение, служащее для передачи крутящего момента), выполняют небольшого размера, достаточного для заведения через него провода в паз. Зубцы изготовляют с параллельными стенками, чтобы магнитный поток, проходящий через них, имел одинаковую плотность по высоте зубца. При этом форма паза получается с непараллельными стенками, что допустимо, так как круглый провод хорошо заполняет пространство паза такой формы.
Полуоткрытые и открытые пазы служат для расположения в них прямоугольных проводов, поэтому пазы изготовляют с параллельными стенками. Если обмотку можно разделить по ширине на две полуобмотки и устанавливать их в паз поочередно, шлиц паза выполняют несколько большим, чем половина ширины паза; если обмотку приходится устанавливать в паз неразделенную, ширина шлица паза должна быть равной ширине паза. При полуоткрытых и открытых пазах зубцы имеют разную ширину по высоте, поэтому и магнитный поток, проходящий по ним, имеет различную плотность
Вопрос 3 Шаговый двигатель(импульсный, реактивный)
Шаговый электродвигатель - это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления [1].
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
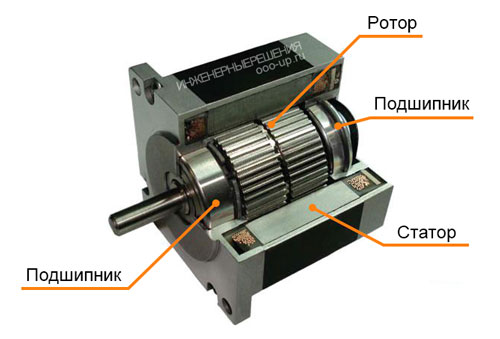
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов
Типы шаговых двигателей
По строению различают следующие типы шаговых двигателей:
Шаговый двигатель с постоянным магнитом. Постоянный магнит такого двигателя выполнен в виде диска. Он расположен на роторе, и создает крутящий момент за счет притяжения и отталкивания обмотки на статоре.
Шаговый двигатель с переменным магнитным сопротивлением. Такой шаговый
двигатель не имеет постоянного магнита. На его роторе расположено зубчатое
колесо из специального металла. Крутящий момент невысокий, но зато отсутствует
стопорящий момент.
Гибридный шаговый двигатель. Представляет собой сочетание двух вышеперечисленных видов двигателей. Для гибридных двигателей характерна очень маленькая величина шага, в результате чего они способны достигать максимальной точности. Однако стоимость таких двигателей достаточно высока.

Оно кароч по часовой бегает кроме постоянных магнитов
С постоянным магнитом красная и синяя переходит на следующую против часовой а средняя по часовой подходит и и получается что минус к плюсу
реактивный шаговый двигатель
У активных шаговых двигателей есть один существенный недостаток: у них — крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса. Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
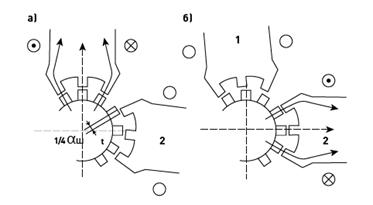
Принцип
действия реактивного редукторного шагового двигателя: (а) — исходное положение
устойчивого равновесия; (б) — положение устойчивого равновесия, сдвинутое на
один шаг.
Билет 23
Вопрос 1 Коммутация машин.
Коммутацией в электрических машинах называется процесс переключения секций обмотки из одной параллельной ветви в другую и связанные с этим явления. Процесс переключения секции протекает достаточно быстро: время коммутации одной секции, называемое периодом коммутации Тк, составляет примерно 0,001 – 0,0003 с. Явления, происходящие при коммутации, существенно влияют на надежность и долговечность работы машины постоянного тока.
При плохой коммутации появляется значительное искрение под
щетками и связанное с ним обгорание коллектора.
 Пути улучшения
коммутации.
Пути улучшения
коммутации.
К искрению под щетками могут приводить и механические причины: неравномерный износ коллектора и его вибрация, чрезмерный износ щеток, выступание отдельных коллекторных пластин и изоляции и т.д. С учетом этого улучшение коммутации возможно несколькими путями:
·
обеспечением в машине прямолинейной или несколько ускоренной
коммутации; это достигается созданием в зоне коммутации секции
дополнительного магнитного поля такой величины и направления, чтобы еL + ![]() = 0 ;
= 0 ;
· увеличением сопротивления короткозамкнутой цепи секции в целях уменьшения тока короткого замыкания; это достигается применением твердых графитовых щеток с повышенным переходным сопротивлением (мягкие медно-графитовые щетки с малым переходным сопротивлением применяются только в тихоходных машинах на напряжение до 30 В);
· тщательным контролем за состоянием поверхности коллектора и щеток.
Главным средством улучшения коммутации в
машинах средней мощности являются дополнительные полюсы. Магнитное поле
дополнительных полюсов подбирается таким образом, чтобы еL + ![]() = 0 или
было несколько больше нуля.
= 0 или
было несколько больше нуля.
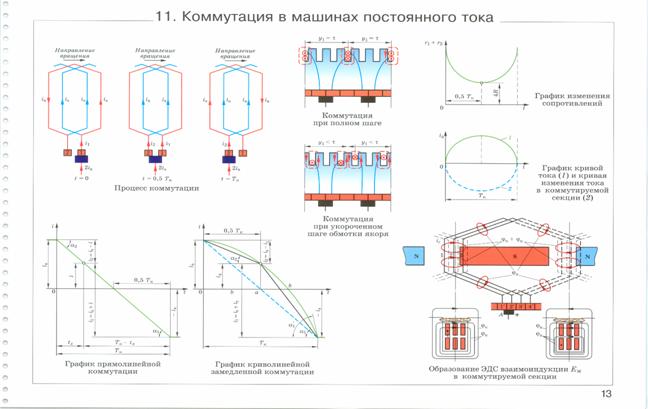
Вопрос 2 Классификация генераторов по способу возбуждения
Классификация генераторов постоянного тока производится по способу их возбуждения. Они подразделяются на генераторы с независимым возбуждением и самовозбуждением.
Генераторы первого типа выполняются с электромагнитным и магнитоэлектрическим возбуждением. В генераторах с электромагнитным возбуждением обмотка возбуждения, располагаемая на главных полюсах, подключается к независимому источнику питания.
Генераторы с магнитоэлектрическим возбуждением возбуждаются постоянными магнитами, из которых изготовляются полюсы машины. С таким видом возбуждения выполняются генераторы относительно небольшой мощности, которые применяются в специальных случаях. Недостатком генераторов с магнитоэлектрическим возбуждением является трудность регулирования напряжения.
У генераторов с самовозбуждением обмотка возбуждения получает питание от собственного якоря. В зависимости от способа ее включения генераторы с самовозбуждением подразделяются на генераторы с параллельным, последовательным и смешанным возбуждением.
 |
У генератора последовательного возбуждения обмотка возбуждения соединяется последовательно с якорем и ее ток возбуждения равен току якоря и току нагрузки
У генераторов смешанного возбуждения на полюсах размещаются две обмотки. Одна из них, имеющая большое число витков и выполненная из проводников относительно небольшого сечения, включается параллельно с якорем, а другая обмотка с малым числом витков из проводников большого сечения включается последовательно с якорем.
Генераторами независимого возбуждения называются генераторы постоянного тока, обмотка возбуждения которых питается постоянным током от постороннего источника электрической энергии (сеть постоянного тока, выпрямитель, аккумулятор и др.) или у которых магнитный поток создается постоянными магнитами.

Схема генератора с независимым возбуждением
Якорь генератора приводится во вращение от приводного двигателя ПД.
Цепь якоря электрически не соединена с цепью возбуждения, поэтому ток нагрузки I и ток якоря Iя – это один и тот же ток (I = Iя). Цепь возбуждения питается от постороннего источника постоянного тока. В нее включают регулировочный реостат R p , предназначенный для регулирования тока возбуждения Iв, магнитного потока возбуждения и в конечном счете ЭДС и напряжения генератора.
Более подробная инфа про генераторы с независимым возбуждением на этом сайте (https://electrono.ru/elektricheskie-mashiny/generatory-nezavisimogo-vozbuzhdeniya)
 Генераторами
параллельного возбуждения называют генераторы, обмотка возбуждения
которых питается от ЭДС обмотки якоря и подключена к выводам якоря машины
параллельно цепи нагрузки.
Генераторами
параллельного возбуждения называют генераторы, обмотка возбуждения
которых питается от ЭДС обмотки якоря и подключена к выводам якоря машины
параллельно цепи нагрузки.
Схема генератора с параллельным возбуждением
Ток якоря IЯ = I + IВ у щеток разветвляется на ток нагрузкиI и ток возбуждения IВ . Обычно ток возбуждения невелик и составляет (0,01-0,05) IЯ.НОМ . Последовательно с обмоткой возбуждения включается реостат RP для регулирования возбуждения. Реостат позволяет изменять ток возбуждения и, следовательно, напряжение генератора.
Самовозбуждение генератора. Так как обмотка возбуждения подключена к выводам якоря, то важное значение имеет процесс первоначального возникновения ЭДС, называемый процессом самовозбуждения.
Рассмотрим процесс самовозбуждения при отключенной нагрузке генератора, т.е. при холостом ходе. Магнитная цепь машины имеет небольшой остаточный магнитный поток (примерно 2-3% номинального). При вращении якоря в поле остаточного потока в нем наводится небольшая ЭДС, вызывающая некоторый ток в обмотке возбуждения. При соответствующем направлении он увеличивает остаточный магнитный поток, ЭДС в якоре возрастает и процесс развивается лавинообразно до тех пор, пока не будет ограничен насыщением магнитной цепи.
Однако процесс самовозбуждения может развиваться только при определенных условиях, называемых условиями самовозбуждения. Выясним эти условия. Уравнение второго закона Кирхгофа для цепи возбуждения имеет вид: Е + еL= (Rв + Rя)iв, где еL = – d (Liв) /dt – ЭДС самоиндукции цепи возбуждения, возникающая при нарастании тока возбуждения;
L – суммарная индуктивность обмоток возбуждения и якоря; Rв — сумма сопротивлений обмотки возбуждения и регулировочного реостата.
Так как Rя « Rв, то уравнение принимает вид:
Eя=Rв iв + ![]()
![]()
Покажем на графике характеристику холостого хода Е = f (Iв) и характеристику цепи возбуждения – прямую Uв = Rв Iв
(рис. 1.21).

Отрезок аб, равный Е – Rв Iв = d (Liв) /dt, пропорционален ЭДС самоиндукции цепи возбуждения. Из графика следует, что в точке в пересечения характеристик d (Liв) /dt = 0 рост тока возбуждения прекращается Uв = E и процесс самовозбуждения заканчивается. Положение точки в, называемой рабочейточкой, зависит от сопротивления цепи возбуждения Rв » tgα. Чем оно больше, тем прямая Uв = f (Iв) идет круче и рабочая точка перемещается влево. При некотором сопротивлении цепи возбуждения Rв, кр = tg αкр, называемом критическим, напряжение на выводах генератора близко к остаточной ЭДС Ео и генератор не возбуждается.
Из сказанного вытекают условия, при которых генератор должен возбуждаться:
· наличие остаточной намагниченности;
· совпадение по направлению остаточного магнитного поля и поля, создаваемого обмоткой возбуждения (несовпадение полей может быть при неправильном подключении выводов обмотки возбуждения или при несоответствующем направлении вращения якоря);
· сопротивление цепи возбуждения должно быть меньше критического;
· скорость вращения якоря должна быть выше критической скорости.
Более подробная инфа про генераторы с независимым возбуждением на этом сайте (https://electrono.ru/elektricheskie-mashiny/generatory-parallelnogo-vozbuzhdeniya)
Генератор с последовательным возбуждением
У этого генератора (рис. 4, а) ток возбуждения Iв равен току нагрузки Iн = Iя и напряжение сильно изменяется при изменении тока нагрузки. При холостом ходе в генераторе индуцируется небольшая э. д. с. Еост, создаваемая потоком остаточного магнетизма (рис. 4, б).
С увеличением тока нагрузки Iи = Iв = Iя возрастают магнитный поток, э. д. с. и напряжение генератора, это возрастание, как и у других самовозбуждающихся машин (генератора с параллельным возбуждением), продолжается до известного предела, обусловленного магнитным насыщением машины.
При увеличении тока нагрузки свыше Iкр напряжение генератора начинает уменьшаться, так как магнитный поток возбуждения из-за насыщения почти перестает увеличиваться, а размагничивающее действие реакции якоря и падение напряжения в цепи обмотки якоря IяΣRя продолжают возрастать. Обычно ток Iкр значительно больше номинального тока. Генератор может работать устойчиво только на части аб внешней характеристики, т. е. при токах нагрузки, больших номинального.
Так как в генераторах с последовательным возбуждением напряжение сильно изменяется при изменении нагрузки, а при холостом ходе близко в нулю, они непригодны для питания большинства электрических потребителей. Используют их лишь при электрическом (реостатном) торможении двигателей с последовательным возбуждением, которые при этом переводятся в генераторный режим.

Генератор со смешанным возбуждением.
В этом генераторе (рис. 5, а) чаще всего параллельная обмотка возбуждения является основной, а последовательная — вспомогательной. Обе обмотки находятся на одних полюсах и соединены так, чтобы создаваемые ими магнитные потоки складывались (при согласном включении) или вычитались (при встречном включении).
Генератор со смешанным возбуждением при согласном включении его обмоток возбуждения позволяет получить приблизительно постоянное напряжение при изменении нагрузки. Внешняя характеристика генератора (рис. 5, б) может быть в первом приближении представлена в виде суммы характеристик, создаваемых каждой обмоткой возбуждения.

При включении только одной параллельной обмотки, по которой проходит ток возбуждения Iв1, напряжение генератора U постепенно уменьшается с ростом тока нагрузки Iн (кривая 1). При включении одной последовательной обмотки, по которой проходит ток возбуждения Iв2 = Iн напряжение U возрастает с увеличением тока Iн (кривая 2).
Если подобрать число витков последовательной обмотки так, чтобы при номинальной нагрузке создаваемое ею напряжение ΔUПОСЛ компенсировало суммарное падение напряжения ΔU при работе машины с одной только параллельной обмоткой, то можно добиться, чтобы напряжение U при изменении тока нагрузки от нуля до номинального значения оставалось почти неизменным (кривая 3). Практически оно изменяется в пределах 2—3 %.
Увеличивая число витков последовательной обмотки, можно получить характеристику, при которой напряжение UHOM будет больше напряжения Uо при холостом ходе (кривая 4), такая характеристика обеспечивает компенсацию падения напряжения не только во внутреннем сопротивлении цепи якоря генератора, но и в линии, соединяющей его с нагрузкой. Если последовательную обмотку включить так, чтобы создаваемый ею магнитный поток был направлен против потока параллельной обмотки (встречное включение), то внешняя характеристика генератора при большом числе витков последовательной обмотки будет круто падающей (кривая 5).
Встречное включение последовательной и параллельной обмоток возбуждения применяют в сварочных генераторах, работающих в условиях частых коротких замыканий. В таких генераторах при коротком замыкании последовательная обмотка почти полностью размагничивает машину и уменьшает ток к. з. до значения, безопасного для генератора.
Генераторы со встречно включенными обмотками возбуждения используют на некоторых тепловозах в качестве возбудителей тяговых генераторов, они обеспечивают постоянство мощности, отдаваемой генератором.
Такие возбудители применяют также на электровозах постоянного тока. Они питают обмотки возбуждения тяговых двигателей, которые при рекуперативном торможении работают в генераторном режиме, и обеспечивают получение круто падающих внешних характеристик.
Генератор смешанного возбуждения является типичным примером регулирования по возмущающему воздействию.
Генераторы постоянного тока часто включаются параллельно для работы на общую сеть. Необходимым условием параллельной работы генераторов с распределением нагрузки пропорционально номинальной мощности является идентичность их внешних характеристик. В случае применения генераторов смешанного возбуждения их последовательные обмотки для выравнивании токов приходится соединять в общий блок посредством уравнительного провода.
Недостатки электрогенераторов
· Выхлоп автономных электрогенераторов содержит такие же вредные выбросы, которые образуются при топке печей и котлов или при работе автомобильных двигателей.
·
Автономные электрогенераторы могут быть опасными. Необходимо
строго соблюдать все инструкции и правила техники
безопасности при работе с электричеством.
· Автономный генератор требует постоянного снабжения топливом. В случае, если он работает на бензине, дизельном топливе или пропане, необходимо оборудовать соответствующее хранилище на месте.
· Работающие на метане автономные генераторы без бесперебойного обеспечения горючим превращают функционирование. Обеспечение же может прерываться в результате природных возмущений, например землетрясений. Поставщики газа обычно в таких случаях отключают его подачу для предотвращения взрывов, происходящих при прорыве газопровода.
Перспективы развития генераторов
Электромобили кардинально меняют производственную среду. Очевидно, они будут играть важную роль в будущем развитии автомобильной промышленности. Это положительно отразится на развитии альтернативных технологий преобразования энергии, поэтому перспективы генераторов также выглядят оптимистично. По сравнению с различными гибридными концепциями, выгодность которых с точки зрения возврата инвестиций не столь очевидна, развивающаяся технология старт-стоп будет представлять собой гораздо более экономичное решение.
В данный момент системы старт-стоп преобладают на рынке. В их конструкции присутствует усовершенствованный стартер и высокопроизводительные генераторы. Использование этих систем, наряду с другими топливосберегающими решениями, позволит внести значительный вклад в дело соблюдения постоянно ужесточающихся требований экологических стандартов.
Вопрос 3 Обмотки машин постоянного тока
Для работы машины постоянного тока необходимо наличие двух обмоток; обмотки возбуждения и обмотки якоря. Первая, как известно, служит для создания в машине основного магнитного потока, а во второй происходит преобразование энергии. Обмотка якоря является замкнутой системой проводников, уложенных в пазах. Элементом якорной обмотки является секция, которая может быть одно- или многовитковой. Секция состоит из активных сторон и лобовых частей. При вращении якоря, в каждой из активных сторон индуцируется ЭДС, величина которой равна:
![]() то есть она зависит от
магнитной индукции полюсов ВСР, длины проводника L и скорости его движения V. В
реальной машине, будь она генератором или электродвигателем, в
наведении ЭДС участвуют все проводники обмотки якоря. Величина суммарной ЭДС:
то есть она зависит от
магнитной индукции полюсов ВСР, длины проводника L и скорости его движения V. В
реальной машине, будь она генератором или электродвигателем, в
наведении ЭДС участвуют все проводники обмотки якоря. Величина суммарной ЭДС:
![]() где n — скорость вращения якоря (ротора),
об/мин;
где n — скорость вращения якоря (ротора),
об/мин;
Ф—магнитный поток полюсов;
Се — постоянный коэффициент, зависящий от количества витков в
секции.
На рис. 5.14, а —в представлены секции петлевой, волновой и лягушечьей обмоток.
Обмотка якоря может быть петлевой и волновой.
Петлевая:
Расстояние между активными сторонами одной секции называется первым шагом обмотки — y1. Расстояние между началом второй секции и концом первой называется вторым шагом обмотки — у2. Расстояние между, началами секций, следующих друг за другом, называется результирующим шагом — у. Шаги обмотки определяются числом пазов. Расстояние между коллекторными пластинами, куда припаиваются начало и конец, принадлежащие одной секции, называется шагом по коллектору — ук. В петлевой обмотке ук= 1. Шаг ук определяется числом коллекторных пластин.

Волновая:
Форма волновой обмотки отлична от петлевой и, следовательно, будет иное соединение секций. Однако шаги волновой обмотки имеют общее с петлевой определение. Шаг по коллектору здесь значительно больше единицы (ук >> 1).

Расстояние между активными сторонами одной секции называется первым шагом обмотки — y1. Расстояние между началом второй секции и концом первой называется вторым шагом обмотки — у2. Расстояние между, началами секций, следующих друг за другом, называется результирующим шагом — у. Шаги обмотки определяются числом пазов. Расстояние между коллекторными пластинами, куда припаиваются начало и конец, принадлежащие одной секции, называется шагом по коллектору — ук. В петлевой обмотке ук= 1. Шаг ук определяется числом коллекторных пластин. Форма волновой обмотки отлична от петлевой и, следовательно, будет иное соединение секций. Однако шаги волновой обмотки имеют общее с петлевой определение. Шаг по коллектору здесь значительно больше единицы (ук >> 1).
Сложные состоят из двух-трех простых петлевых или волновых обмоток. Сложная обмотка, объединяющая простую петлевую и волновую обмотки, называется лягушечьей
Билет 24
Вопрос 1 СД с постоянными магнитами.
Синхронный двигатель с постоянными магнитами (англ. permanent magnet synchronous motor, PMSM) - это синхронный электродвигатель, индуктор которого состоит из постоянных магнитов.
Главное отличие между синхронным двигателем с постоянными магнитами (СДПМ) и асинхронным электродвигателем заключается в роторе. Проведенные исследования показывают, что СДПМ имеет КПД примерно на 2% больше, чем высоко эффективный (IE3) асинхронный электродвигатель, при условии, что статор имеет одинаковую конструкцию, а для управления используется один и тот же частотный преобразователь. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и др.
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор - неподвижная часть, ротор - вращающаяся часть.
Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором - электродвигатели обращенного типа.

Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
По конструкции ротора синхронные двигатели делятся на:
· электродвигатели с явно выраженными полюсами;
· электродвигатели с неявно выраженными полюсами.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.
Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
· с распределенной обмоткой;
· с сосредоточенной обмоткой.
Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3,...., k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток - невозможность влияния на форму кривой ЭДС.
Схема трехфазной распределенной обмотки
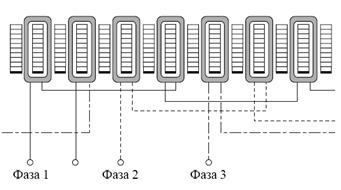
Схема трехфазной сосредоточенной обмотки
Форма обратной ЭДС электродвигателя может быть:
· трапецеидальная;
· синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапецеидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора.
Принцип работы синхронного двигателя
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее).
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
Вопрос 2 АД при неподвижном роторе. Замещение вращающегося ротора эквивалентным неподвижным.
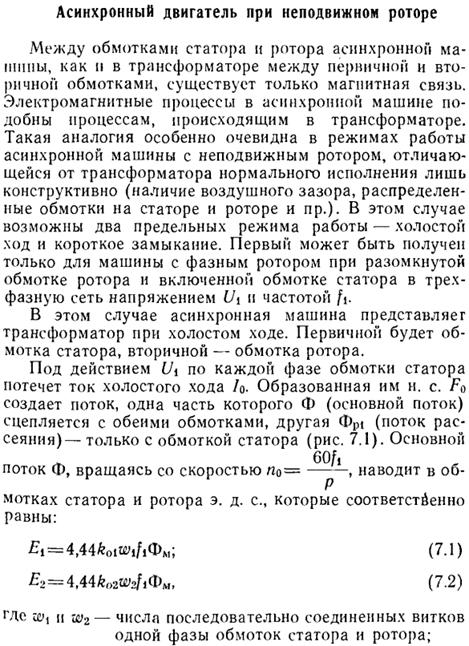
В асинхронной машине при вращающемся роторе происходит преобразование электрической энергии в механическую, если она работает двигателем, и обратное преобразование, если она работает генератором. Кроме того, при вращении ротора частота тока в его обмотке отличается от частоты тока в обмотке статора. В тоже время асинхронная машина при неподвижном роторе с точки зрения преобразования энергии полностью соответствует трансформатору. Возникает желание заменить асинхронную машину при вращающемся роторе эквивалентной ей по энергетическим и электромагнитным процессам машиной при неподвижном роторе. Это возможно, если воспользоваться той особенностью магнитного поля ротора, что оно при любых установившихся режимах вращается синхронно с магнитным полем статора. Наблюдая все магнитные поля в единой системе координат, неподвижной по отношению к статору, можно предположить, что ротор неподвижен.
Ток во вращающемся роторе при скольжении s

r2 – активное сопротивление фазы обмотки ротора.
Индуктивное сопротивление рассеяния фазы ротора при скольжении s
![]()
x2 – индуктивное сопротивление рассеяния при неподвижном роторе.
ЭДС, наводимая в фазе ротора при скольжении s

E2 – ЭДС, наводимая в фазе неподвижного ротора (s = 1, f2 = f1).
Тогда,

Поделим числитель и знаменатель на скольжение s

Токи I2s и I2 имеют одинаковые значения. Одинаковыми будут углы их сдвига от ЭДС

Такая формальная операция не меняет модуля и фазы вторичного тока по отношению к соответствующим ЭДС E2s и E2. Однако, ток I2s и ЭДС E2s=sE2 имеют частоту f2 = sf1, а ток I2 и ЭДС E2 имеют частоту f1. Замена тока I2s эквивалентным током I2 может быть физически истолкована как приведение вторичного (роторного) тока по частоте. При этом сам ротор становится неподвижным. Магнитное поле от тока I2 будет также взаимодействовать с полем статора при неподвижном роторе, как и поле от тока I2s при вращающемся.
Чтобы получить ток в обмотке неподвижного ротора таким же по значению и фазе, как во вращающемся роторе, достаточно в цепи этой обмотки установить активное сопротивление r2/s, то есть активное сопротивление обмотки увеличить на величину
![]()
Асинхронная машина с эквивалентным неподвижным ротором в электрическом отношении будет подобна трансформатору, работающему на чисто активную нагрузку rмх.
Вопрос 3 Гистерезисный СД.
В настоящее время в схемах автоматики получили весьма широкое распространение синхронные гистерезисные микродвигатели. Статор обычного гистерезисного двигателя ничем не отличается от статоров синхронных и асинхронных машин. Пакет статора набирается из изолированных листов электротехнической стали. В полузакрытых (с неширокой прорезью) пазах располагается обычная трехфазная или двухфазная (в конденсаторных двигателях) обмотка, которая при подключении к сети переменного тока создает вращающееся магнитное поле. Ротор большинства гистерезисных двигателей представляет собой сплошной или шихтованный полый цилиндр из магнитотвердого материала, имеющего широкую петлю гистерезиса (обладающего большой остаточной намагниченностью), и располагается на магнитной или немагнитной втулке. Магнитные схемы гистерезисных двигателей с различными роторами представлены на рис. 18.18.
Принцип действия гистерезисного двигателя рассмотрим на примере двигателя со сплошным массивным ротором (рис. 18.19). Вращающий момент такого двигателя можно представить как сумму двух моментов: основного гистерезисного МГ, обусловленного наличием большой остаточной намагниченности, и момента от вихревых токов Мв: М= МГ + Мв.
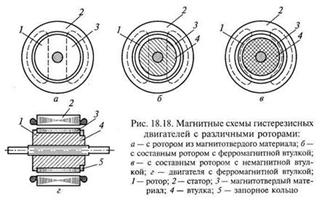
Момент от вихревых токов возникает в результате взаимодействия вращающегося магнитного поля двигателя с вихревыми токами ротора. По своей природе это асинхронный момент. Он равен нулю при синхронизме и вследствие большого активного сопротивления массивного ротора максимален при пуске (n = 0). Если бы двигатель обладал только моментом от вихревых токов, то его механическая характеристика не отличалась бы ничем от механической характеристики обычного асинхронного двигателя с повышенным активным сопротивлением ротора, имеющего sK > 1.
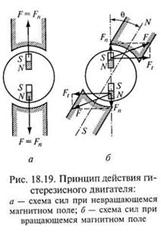
Возникновение гистерезисного момента объясняется наличием у материала ротора широкой петли гистерезиса. При асинхронной скорости вращения ротор, находясь в магнитном поле, все время перемагничивается. При этом ось поля ротора, изготовленного из магнитотвердого материала, при наличии момента сопротивления на валу отстает от оси вращающегося магнитного поля на некоторый угол θ. В результате взаимодействия поля ротора с опережающим его вращающимся магнитным полем статора возникает вращающий гистерезисный момент МГ.
Если ротор гистерезисного двигателя поместить в магнитное поле, то он намагнитится, его области спонтанной намагниченности — элементарные магнитики будут ориентированы по силовым линиям магнитного поля. На рис. 18.19 схематично показаны два элементарных магнитика. В результате взаимодействия внешнего поля, которое для наглядности представлено в виде двух полюсов магнита, с элементарными магнитиками ротора возникнут силы F = Fn которые в положении ротора, соответствующем, показанному на рис. 18.18, а, будут направлены радиально. Момент, действующий на ротор в этом случае, будет равен нулю.
Если полюсы магнита, а следовательно, внешнее магнитное поле вращать относительно ротора, то элементарные магнитики будут поворачиваться вслед за полем полюсов, однако вследствие молекулярного трения, которое у магнитотвердых материалов весьма значительно, они будут отставать от поля полюсов на некоторый угол θ. Силы взаимодействия F между элементарными магнитиками и полем полюсов магнита в этом случае (см. рис. 18.19, б) кроме радиальных составляющих Fn будут иметь еще тангенциальные составляющие Ft, которые и создадут вращающий гистерезисный момент.

На рис. 18.20 представлены механические характеристики гистерезисного двигателя — зависимости гистерезисного момента МГ, момента от вихревых токов Мв и суммарного момента М = MГ + Мв от частоты вращения n при круговом поле, синусоидально распределенном в пространстве. У гистерезисных двигателей с шихтованным ротором вихревые токи практически отсутствуют, поэтому Мв = 0 и механическая характеристика М= МГ = f(n) имеет вид прямой линии.
Роторы гистерезисных двигателей по конструктивному исполнению можно разделить на три группы.
1. Роторы (сплошные или шихтованные), целиком изготовленные из магнитотвердого материала (см. рис. 18.18, а).
2. Сборные роторы, состоящие из полого цилиндра (сплошного или шихтованного), изготовленного из магнитотвердого материала и ферромагнитной втулки (см. рис. 18.18, б). Такие роторы обычно применяются в случае, если магнитотвердый материал имеет малую магнитную проницаемость μ (сравнительно небольшую индукцию насыщения Вm при большой коэрцитивной силе Нс).
3. Сборные роторы, состоящие из активной части — полого (сплошного или шихтованного) цилиндра из магнитотвердого материала — и немагнитной (μ = 1) втулки из алюминия или пластмассы (см. рис. 18.18, в). Такие роторы применяются в том случае, когда магнитотвердый материал имеет сравнительно большую магнитную проницаемость μ (большую Вт при сравнительно небольшой Нс).
Наибольшее распространение в настоящее время получили роторы второй и третьей групп. В некоторых двигателях активная часть ротора изготовляется не из листов, а из проволоки, полос или пресс-порошка.
Положительные качества синхронных гистерезисных двигателей следующие:
большие пусковой момент и момент входа в синхронизм;
независимость момента входа в синхронизм от момента инерции;
плавность входа в синхронизм — отсутствие рывка;
незначительное изменение тока — на 20... 30 % от пуска (n = 0) до холостого хода (n = nс) и на 1... 3 % от холостого хода до номинальной нагрузки;
сравнительно высокий КПД, достигающий в некоторых двигателях 60%;
малое время разгона;
большая механическая прочность и симметрия ротора, что позволяет создавать высокоскоростные двигатели, в том числе гидродвигатели;
способность одного и того же ротора работать в магнитных полях различной полюсности — полисинхронизм ротора, позволяющий создавать многоскоростные синхронные двигатели, хотя и неравноценные по качеству на различных скоростях из-за различного намагничивания активного материала ротора;
высокая температурная стабильность пусковых и рабочих характеристик, обусловленная тем, что изменение температуры влияет лишь на значение активного сопротивления обмотки статора;
высокая надежность, малый уровень шума и сравнительно небольшие габариты и масса.
Недостатки синхронных гистерезисных двигателей, ограничивающие области их применения, сводятся к следующим:
низкий коэффициент мощности (cosφ), не превосходящий 0,3...0,45;
малая стабильность мгновенной скорости вращения — качание ротора при резко изменяющихся нагрузках;
большой технологический разброс характеристик двигателя, объясняющийся тем, что даже незначительные отклонения от установленного режима термической обработки ведут к значительным изменениям свойств магнитотвердых материалов;
высокая стоимость магнитотвердых
материалов и сложность их механической обработки.
Билет 25
Вопрос 1 МДС вращающегося ротора АД
Основной магнитный поток Ф в асинхронном двигателе создается совместным действием МДС обмоток статора F1 и ротора F2:
![]() =
(
=
( ![]() 1 +
1 + ![]() 2)
/ Rм =
2)
/ Rм = ![]() 0 /
Rм (12.10)
0 /
Rм (12.10)
где Rм — магнитное сопротивление магнитной цепи двигателя потоку Ф; F0 — результирующая МДС двигателя, численно равная МДС обмотки статора в режиме х.х. [см. (9.16)]:
F0 = 0,45m1 I1 ω1 kоб1/ P (12.11)
I0 — ток х.х. в обмотке статора, А.
МДС обмоток статора и ротора на один полюс в режиме нагруженного двигателя
F1 = 0,45 m1 I1 ω1 kоб1/ P
F2 = 0,45 m2 I2 ω2 kоб2/ P (12.2)
где m2 — число фаз в обмотке ротора; ko62 — обмоточный коэффициент обмотки ротора.
При изменениях нагрузки на валу двигателя меняются токи в статоре I1, и роторе I2. Но основной магнитный поток Ф при этом сохраняется неизменным, так как напряжение, подведенное к обмотке статора, неизменно (U1 = const) и почти полностью уравновешивается ЭДС Е1 обмотки статора [см. (12.3)]:
![]() 1 ≈
(-
1 ≈
(- ![]() 1) (12.13)
1) (12.13)
Так как
ЭДС Е1 пропорциональна основному магнитному потоку Ф [см.
(7.20)], то последний при изменениях нагрузки остается неизменным. Этим и
объясняется то, что, несмотря на изменения МДС F1 и F2,
результирующая МДС остается неизменной, т. е. ![]() 0 =
0 = ![]() 1 +
1 + ![]() 2 =
const.
2 =
const.
Подставив вместо F0, F1 и F2 их значения по (12.11) и (12.12), получим
0,45 m1 ![]() 0 ω1 kоб1/
p = 0,45m1
0 ω1 kоб1/
p = 0,45m1 ![]() 1 ω1 kоб1/
p + 0,45 m2
1 ω1 kоб1/
p + 0,45 m2 ![]() 2 ω2 ko62/
р.
2 ω2 ko62/
р.
Разделив это равенство наm1 ω1 kоб1/ p, определим уравнение токов асинхронного двигателя:
![]() 0 =
0 = ![]() 1 +
1 + ![]() 2
2  =
= ![]() 1 +
1 + ![]() ′2
′2 ![]() (12.14)
(12.14)
где
![]() ′2
′2 ![]() =
= ![]() 2 (12.15)
2 (12.15)
- ток ротора, приведенный к обмотке статора.
Преобразовав уравнение (12.14), получим уравнение токов статора асинхронного двигателя
![]() 1 =
1 = ![]() 0 +
(-
0 +
(- ![]() ′2
′2 ![]() ) (12.16)
) (12.16)
из
которого следует, что ток статора в асинхронном двигателе ![]() 1 имеет
две составляющие:
1 имеет
две составляющие: ![]() 0 -
намагничивающую (почти постоянную) составляющую ( I0 ≈ I1μ )
и -
0 -
намагничивающую (почти постоянную) составляющую ( I0 ≈ I1μ )
и - ![]() ′2 —переменную
составляющую, компенсирующую МДС ротора.
′2 —переменную
составляющую, компенсирующую МДС ротора.
Следовательно,
ток ротора I2 оказывает на магнитную систему двигателя такое же
размагничивающее влияние, как и ток вторичной обмотки трансформатора (см. §
1.5). Таким образом, любое изменение механической нагрузки на валу двигателя
сопровождается соответствующим изменением тока в обмотке статора I1 так
изменение этой нагрузки двигателя вызывает изменение скольжения s. Это, в свою
очередь, влияет на ЭДС обмотки ротора [см.(12.6)], а следовательно, и на ток
ротора I2. Но так как этот ток развивает размагничивающее действие
на магнитную систему двигателя, то его изменения вызывают соответствующие
изменение тока в обмотке статора I1 за счет составляющей – I′2 .
Так, в режиме холостого хода, когда нагрузка на валу двигателя отсутствует и
s ≈ 0, ток I2 ≈ 0.
В этом случае ток в обмотке статора ![]() 1 ≈
1 ≈ ![]() 0.
Если же ротор двигателя затормозить, не отключая обмотку статopa от сети (режим
короткого замыкания), то скольжение s = 1 и ЭДС обмотки ротора Е2s достигает
своего наибольшего значения Е2. Также наибольшего значения достигнет
ток I2, а следовательно, и ток в обмотке статора I1.
0.
Если же ротор двигателя затормозить, не отключая обмотку статopa от сети (режим
короткого замыкания), то скольжение s = 1 и ЭДС обмотки ротора Е2s достигает
своего наибольшего значения Е2. Также наибольшего значения достигнет
ток I2, а следовательно, и ток в обмотке статора I1.
Вопрос 2 Специальные трансформаторы.
Специальные трансформаторы представляют собой особый тип устройств, предназначенных для выполнения определенных целей. Наиболее популярными и востребованными являются трехобмоточные, автомобильные, измерительные варианты. Каждая техника обладает собственными видами подключения, нюансами использования.
Специальный трансформатор — это не определенное устройство, а класс оборудования, который включает в себя несколько видов.
Трехобмоточный
Трехобмоточный тип необходим для корректного распределения поступающий электрической энергии. Используется в радиотехнике, является небольшим по габаритам и весу специальным трансформатором. Он заменяет два двухомоточных, так как с его помощью получают два вида энергии по номинальным показателям. Качество позволяет упростить работу инженера, потратить меньше на прибор.
Схема трехобмоточного типа проста. Присутствует три несвязанных друг с другом обмотки, которые находятся на одном стержне. На первичную обмотку поступает энергия, создается магнитный поток.
В результате обмотки 2 и 3 дают различные номинальные показатели, при этом в сумме они всегда дают большее число, чем одна первая.
Под номинальный мощностью понимают показатель первичной, хотя в целом, если учитывать суммирование второй и третьей, то оно будет выше.
Автомобильные
Специальные типы автомобильных трансформаторов широко применяются в конструировании средств передвижения. В отличии от обычного оборудования есть связь сторон ВН и НН (последняя часть обмотки первой). В зависимости от числа витков изменяется то, будет ли коэффициент повышающими или понижающим. Ток нагрузки действует на участок обмотки не целиком, а выборочно, при этом трансформация не отличается от единицы. Токи практически идентичные, в результате возникают показатели небольшие. Устанавливают провода меньшего сечения, так как это не влияет на функциональность. Обратите внимание, что:
· мощность передается во вторичную сторону;
· чем сильней коэффициент стремится к единице, тем больше мощности уходит во вторичную сторону;
· сечения идентичные с привычным трансформатором, если индукция и поток одинаковы.
Несмотря на все преимущества автомобильные трансформаторы имеют некоторые недостатки. Среди ни выделяют:
· необходимость изоляции обмоток (из-за связи обмоток с разным напряжением);
· возможно попадание высокого напряжения на низкое, что пагубно скажется на сроке службы изделия.
Трансформаторы такого типа подбираются в строгом соответствии с требованиями автомобильно транспорта.
Измерительные
Измерительные трансформаторы используются для расширения функционала приборов. В результате внедрения оборудования в конструкцию снижается риск короткого замыкания — повышается безопасность на производстве. Измерительная техника применяется в устройствах сигнализации, релейной защиты и автоматических устройствах.
Прибор состоит из нескольких обмоток и магнитного провода. Первичная подключается последовательным образом, включается в сеть. Вторичная имеет обмотки меньшего сечения, но большее число. К устройству подключатся счетчики, амперметры, катушки, трансформаторы работают на токах от 5 до 15 тысяч Ампер. Коэффициент трансформации — это сумма токов внешней и внутренней обмоток. Узнать значение параметра можно на эксплуатационном листе измерительного трансформатора.
Приборы этого типа разделяются по классу точности. Погрешность выражается в процентном соотношении тока. Вторичная нагрузка соответствует каждому варианту точности, при этом если она максимальная, то погрешность увеличивается.
Трансформаторы напряжения
Трансформаторы напряжения – это разновидность трансформаторов, задача которых не преобразовывать, а гальваническая развязка.
От источника электроэнергии или станции ток с высоким напряжением не может использоваться потребителями. Чтобы понизить его на входе устанавливаются понижающие трансформаторы. Они дают возможность работать на расчетном напряжении для бытовой техники, электроприборов и электроники. Их использование позволяет осуществлять работу типовых измерительных приборов. Трансформатор изолирует их от высокого сетевого напряжения, что крайне необходимо для их безопасного обслуживания и эксплуатации.
По назначению они разделяются на два основных вида – повышающие и понижающие. Преобразование напряжения в домашних условиях крайне необходимо. Бытовые приборы, питающиеся от сети 380 или 220 вольт,
нуждаются в напряжении в несколько раз меньше. Во избежание выхода из строя бытового оборудования нужны понижающие. При необходимости используют повышающие аналоги.
Кроме главной функции – преобразования напряжения и тока, ТН могут быть источниками питания для автоматики, релейной защиты электролиний от замыкания, сигнализаций и т.п. Также они используются в качестве измерителей напряжения и мощности.
По сути – трансформатор напряжения – это статический электромагнитный прибор, который преобразует переменный ток одного напряжения в переменный ток другого напряжения. По конструктивным решениям и по принципу действия он сходен с силовым аналогом.
Если параметр превышает значение 3 тысяч, то обязательно применяют специальные масляные варианты, при этом кожух заземляют во избежание производственных травм.
Трансформаторы в составе печей сопротивления
К специальным трансформаторам, также можно отнести трансформаторы, используемые в составе печей сопротивления и соляных электродных ваннах. В большинстве случаев, для этих целей применяются трансформаторы сухого типа с естественным воздушным охлаждением.
Особенностью таких печных трансформаторов является наличие нескольких ступеней регулирования, как правило, не более 8-ми. С одной стороны, это обусловлено необходимостью иметь несколько температурных режимов печи, а с другой – материалом нагревателей, которые могут менять в широких пределах свое сопротивление при изменении температуры. Как правило, переключение ступеней регулирования напряжения происходит без возбуждения, путем изменения числа витков первичной обмотки.
Также особенностью таких трансформаторов являются относительно низкие величины вторичного напряжения и большие токи обмотки низкого напряжения. Так как нагрузка в печах сопротивления и соляных электрованнах носит относительно спокойный характер (без режимов эксплуатационных коротких замыканий), то в остальном, конструкция таких трансформаторов может быть идентична сухим силовым трансформаторам общего назначения.
Вопрос 3 Построение круговой диаграммы по опытам ХХ и КЗ.
При выполнении опыта холостого
хода АМ работает в режиме двигателя. Подводимое к машине напряжение изменяется
в пределах (1,15…0,4) ![]() . При этом регистрируется потребляемые ток
. При этом регистрируется потребляемые ток![]() и мощность
и мощность![]() , тогда
, тогда .
По данным опыта холостого хода строят характеристики холостого хода, т.е.
зависимости
.
По данным опыта холостого хода строят характеристики холостого хода, т.е.
зависимости![]() . Из опыта холостого хода определяют одну
из характерных точек, лежащих на окружности токов (рис. 2.17).
. Из опыта холостого хода определяют одну
из характерных точек, лежащих на окружности токов (рис. 2.17).

С этой целью берут ток холостого
хода ![]() , соответствующий
номинальному напряжению
, соответствующий
номинальному напряжению ![]() . Вектор тока
. Вектор тока![]() отклоняется
под углом
отклоняется
под углом![]() к вектору первичного напряжения
к вектору первичного напряжения![]() , причем
, причем![]() . Конец этого вектора, т.е. точка
. Конец этого вектора, т.е. точка![]() лежит на окружности токов. Ток
лежит на окружности токов. Ток ![]() и
точка
и
точка ![]() соответствуют реальному холостому ходу АМ.
Далее определим приближенно положение точки, соответствующей синхронному
холостому ходу. С этой целью в масштабе мощности отложим из точки
соответствуют реальному холостому ходу АМ.
Далее определим приближенно положение точки, соответствующей синхронному
холостому ходу. С этой целью в масштабе мощности отложим из точки![]() перпендикуляр к оси абсцисс равный величине
перпендикуляр к оси абсцисс равный величине![]() .
.
Точка О соответствует
синхронному холостому ходу, а ![]() –
току синхронного холостого хода. С достаточным приближением можно считать
–
току синхронного холостого хода. С достаточным приближением можно считать![]() . ТочкуО будем считать первой характерной точкой
окружности токов.
. ТочкуО будем считать первой характерной точкой
окружности токов.
Вторая точка окружности тока
определяется из опыта короткого замыкания АМ. Опыт короткого замыкания
выполняется при неподвижном роторе, при этом к обмотке статора подводится
пониженное напряжение, которое изменяется в таких пределах, чтобы ток короткого
замыкания ![]() не превышал 1,2
не превышал 1,2![]() .
В процессе выполнения опыта короткого замыкания строят характеристики короткого
замыкания, т. е. зависимости
.
В процессе выполнения опыта короткого замыкания строят характеристики короткого
замыкания, т. е. зависимости![]() ,
где
,
где .
.
Для построения круговой диаграммы двигателя
следует данные опыта короткого замыкания привести к номинальному напряжению.
Если ![]() линейна, то приведение осуществляются
следующим образом
линейна, то приведение осуществляются
следующим образом
 ,
,  .
.
Здесь ![]() – потребляемый ток и мощность короткого замыкания при
– потребляемый ток и мощность короткого замыкания при![]() .
.
Д ля определения второй точки, лежащей на
окружности токов под углом
ля определения второй точки, лежащей на
окружности токов под углом![]() к вектору
к вектору![]() отложить
вектор
отложить
вектор![]() . Конец вектора
. Конец вектора![]() ,
т.е точкаК и будет искомой точкой. Соединив точки О и К получим
отрезок ОК , который является хордой искомой окружности токов.
Для определения центра окружности следует восстановить перпендикуляр к этой
хорде. Центр окружности О1 получится в пересечении
перпендикуляра с прямой ОВ. Прямая ОК будет
являться линией полной механической мощности (
,
т.е точкаК и будет искомой точкой. Соединив точки О и К получим
отрезок ОК , который является хордой искомой окружности токов.
Для определения центра окружности следует восстановить перпендикуляр к этой
хорде. Центр окружности О1 получится в пересечении
перпендикуляра с прямой ОВ. Прямая ОК будет
являться линией полной механической мощности (![]() ).
Для получения линии электромагнитной мощности следует опустить перпендикуляр
).
Для получения линии электромагнитной мощности следует опустить перпендикуляр![]() к оси абсцисс и разбить его в отношении
к оси абсцисс и разбить его в отношении .
.
Проведя прямую ОТ, через точку Т1 получим линию электромагнитной мощности.
Построенная подобным образом
круговая диаграмма используется для построения рабочих характеристик. С этой
целью необходимо задаться несколькими значениями тока ![]() в
в
пределах от ![]() до 1,2
до 1,2 ![]() и для этих значений определить
соответствующие величины рабочих характеристик
и для этих значений определить
соответствующие величины рабочих характеристик![]() рис.2.18.
рис.2.18.
В заключение отметим, что
круговая диаграмма может быть построена и в соответствии с точной схемой
замещения. В этом случае диаметр круговой диаграммы поворачивается против
часовой стрелки на угол ![]() (рис.2.19), где
(рис.2.19), где ,
причем
,
причем![]() аргумент
аргумент![]() ,
,![]() .
.
Угол ![]() очень мал и чем меньше угол, тем больше мощность машины.
очень мал и чем меньше угол, тем больше мощность машины.
Билет 26
Вопрос 1 Специальные машины постоянного тока
1) Здесь рассматриваются специальные машины постоянного тока, имеющие наиболее важное значение в теоретическом и практическом отношениях. По схемам соединений их обмоток, а иногда и по конструкции они отличаются от нормальных машин. Большинство же машин постоянного тока, используемых для специальных целей, от нормальных машин не отличаются
а) Униполярные машины

Можно себе представить что изображенный здесь диск состоит из очень большого числа проводников в виде секторов S. Каждый из них при вращении все время будет находиться в поле одной и той же полярности; следовательно, наведенная в нем ЭДС все время будет направлена в одну сторону. При выбранных направлениях поля и вращения она всегда направлена от центра к периферия диска.
При вращении диска на смену одним проводникам будут приходить в соприкосновение со щетками другие проводники и мы будем получать постоянный ток
б) Сварочный генератор с двойной полюсной системой
Рассматриваемая машина иначе называется сварочным генератором с «расщепленными» полюсами. Одна из них схематически представлена на рисунке 4.31. Здесь мы имеем двойную полюсную систему N1—N2 и S1—S2, причем полюсы N1 и S1 слабо насыщены, а полюсы N2 и S2 сильно насыщены (их сердечники имеют сравнительно небольшое сечение). Обмотка возбуждения присоединена к главной щетке В и к вспомогательной щетке b, помещенной между главными щетками А и В, находящимися на геометрической нейтрали.

Внешние характеристики сварочного генератора показаны на рисунке 4.32. Они достаточно благоприятны для целей электрической сварки. Установка наибольшего тока (тока короткого замыкания) достигается при помощи реостата в цепи возбуждения, показанного на рисунке 4.31. Реактивная катушка L в цепи якоря служит для сглаживания тока при его резких колебаниях.

в) Электромашинные усилители
Обыкновенный генератор с независимым возбуждением может рассматриваться как усилитель. В этом случае мы должны считать мощность, подведенную к обмотке возбуждения, за «входную» Рвх (или мощностью управления), а мощность на зажимах якоря - за «выходную» Рвых
Отношение Рвых/Рвх=kу называется коэффициентом усиления. Для нормальных машин небольшой мощности (0,5…30 кВт) kу=15…50, т.е. в таких машинах мы получаем «усиление» мощности в 15…50 раз (конечно, за счет мощности первичного двигателя, которым должен приводиться во вращение всякий электромашинный усилитель).
Можно при помощи двух генераторов независимого возбуждения получить двухступенчатый усилитель (рис. 4.33). Здесь общий коэффициент усиления будет равен произведению коэффициентов усиления отдельных машин ky=k'yk"y. Он будет, следовательно, значительно больше, чем в предыдущем случае; для нормальных машин при мощности на выходе порядка 30 кВт kу=1000…1200.

Рассмотренные усилители во многих случаях малопригодны для автоматических устройств. Основным их недостатком является большая «инерционность» цепей возбуждения, имеющих большие индуктивности.
Отмеченные недостатки в значительно меньшей степени проявляются в электромашинном усилителе поперечного поля, называемом сокращенно ЭМУ поперечного поля

ЭМУ поперечного поля представляет собой коллекторную машину постоянного тока
Вопрос 2 Специальные трансформаторы
Специальные трансформаторы представляют собой особый тип устройств, предназначенных для выполнения определенных целей. Наиболее популярными и востребованными являются трехобмоточные, автомобильные, измерительные варианты. Каждая техника обладает собственными видами подключения, нюансами использования.
•Трехобмоточный
Трехобмоточный тип необходим для корректного распределения поступающий электрической энергии. Используется в радиотехнике, является небольшим по габаритам и весу специальным трансформатором. Он заменяет два двухобмоточных, так как с его помощью получают два вида энергии по номинальным показателям. Качество позволяет упростить работу инженера, потратить меньше на прибор.
Схема трехобмоточного типа проста. Присутствует три несвязанных друг с другом обмотки, которые находятся на одном стержне. На первичную обмотку поступает энергия, создается магнитный поток.
В результате обмотки 2 и 3 дают различные номинальные показатели, при этом в сумме они всегда дают большее число, чем одна первая.
•Автомобильные
Специальные типы автомобильных трансформаторов широко применяются в конструировании средств передвижения. В отличии от обычного оборудования есть связь сторон ВН и НН (последняя часть обмотки первой). В зависимости от числа витков изменяется то, будет ли коэффициент повышающими или понижающим. Ток нагрузки действует на участок обмотки не целиком, а выборочно, при этом трансформация не отличается от единицы. Токи практически идентичные, в результате возникают показатели небольшие. Устанавливают провода меньшего сечения, так как это не влияет на функциональность. Обратите внимание, что:
мощность передается во вторичную сторону;
чем сильней коэффициент стремится к единице, тем больше мощности уходит во вторичную сторону;
сечения идентичные с привычным трансформатором, если индукция и поток одинаковы.
•Измерительные
Измерительные трансформаторы используются для расширения функционала приборов. В результате внедрения оборудования в конструкцию снижается риск короткого замыкания — повышается безопасность на производстве. Измерительная техника применяется в устройствах сигнализации, релейной защиты и автоматических устройствах.
Прибор состоит из нескольких обмоток и магнитного провода. Первичная подключается последовательным образом, включается в сеть. Вторичная имеет обмотки меньшего сечения, но большее число. К устройству подключатся счетчики, амперметры, катушки, трансформаторы работают на токах от 5 до 15 тысяч Ампер. Коэффициент трансформации — это сумма токов внешней и внутренней обмоток. Узнать значение параметра можно на эксплуатационном листе измерительного трансформатора.
•Трансформаторы напряжения
Устройства применяются в схемах оборудования с напряжением от 380 В. Схема схожа с силовыми понижающими приборами. Первичная обмотка состоит из конструкций малого сечения, подключается параллельно. Вторичная имеет большие по размеру витки. Сопротивление приборов вольметров, катушек, частотометров максимальное, при помощи трансформатора напряжения понижающего типа вносят корректировку в работу.
•Трансформаторы в составе печей сопротивления
К специальным трансформаторам, также можно отнести трансформаторы, используемые в составе печей сопротивления и соляных электродных ваннах. В большинстве случаев, для этих целей применяются трансформаторы сухого типа с естественным воздушным охлаждением.
Особенностью таких печных трансформаторов является наличие нескольких ступеней регулирования, как правило, не более 8-ми. С одной стороны, это обусловлено необходимостью иметь несколько температурных режимов печи, а с другой – материалом нагревателей, которые могут менять в широких пределах свое сопротивление при изменении температуры.
Сайт: https://otransformatore.ru/izmeritelnyj/spetsialnye-transformatory/
регулирование частоты вращения двигателей постоянного тока можно осуществлять путем изменения потока Ф, введения дополнительного сопротивления в цепь якоря и изменения напряжения сети . В двигателях параллельного возбуждения наиболее просто осуществляется регулирование изменением потока, реализуемого с помощью реостата в цепи возбуждения. При увеличении сопротивления поток Ф уменьшается и частота вращения растет
сайт: https://leg.co.ua/knigi/oborudovanie/elektricheskie-mashiny-51.html
Вопрос 3 Регулирование частоты вращения двигателя постоянного тока
Задача управления двигателем в основном сводится к регулированию частоты вращения. Реже встречается задача управления моментом двигателя. Из формулы n следует, что изменение частоты вращения может достигаться тремя способами: включением реостата Rр в цепь якоря (реостатное регулирование); изменением магнитного потока Φ (полюсное регулирование); изменением подводимого к якорю напряжения (якорное регулирование).

Изменение характеристик при регулировке частоты вращения ДПТ с помощью: а – Ф (параллельное возбуждение); б – Ф или U якоря (последовательное возбуждение); в – U якоря (неза- висимое возбуждение)
При реостатном регулировании вместо пускового реостата Rп в цепь якоря вводится регулировочный реостат Rр, рассчитанный на длительные тепловые перегрузки. Ступенчатое увеличение Rр при Mc = = const снижает частоту вращения (характеристики И3, И2, И1, Е – рис. Пуск ДПТ с реостатом). Из-за больших потерь в Rр этот способ регулирования применяют только для двигателей небольшой мощности.
Полюсное регулирование. Для ДПТ параллельного возбуждения изменение магнитного потока Φ достигается введением регулировочного реостата Rр в цепь ОВ. При увеличении Rр ток Iв и магнитный поток Φ уменьшаются, что дает увеличение частоты холостого хода n0. Жесткость механической характеристики уменьшается незначительно Таким образом, изменением (уменьшением) магнитного потока можно увеличить частоту вращения n, но не более чем до 2nном, что связано с ухудшением коммутации. Регулирование n в сторону уменьшения практически невозможно из-за насыщения магнитной системы. Сильное снижение Φ, например до величины Φост, при случайном обрыве обмотки возбуждения при незначительном моменте Mс на валу ведет к «разносу» двигателя (пунктирная характеристика на рис. а).
Якорное регулирование (регулирование частоты изменение напряжения в цепи якоря).

Рисунок 1
Пусть механическая хар-ка 1 (см.рис) получена при напряжении U1 и потоке возбуждения Ф1. Изменение напряжения приведет к тому, что изменится скорость идеального холостого хода w0=U/KeФ, т.е. скорость при моменте сопротивления, равном нулю (реально при отсутствии полезной нагрузки на валу действует момент сопротивления М0). Наклон характеристики, определяемый коэффициентом (rя+rд)/кекмФ2, не зависит от напряжения. Характеристика 2 соответствует значению U2<U1.
Этот способ регулирования следует признать основным для ДПТ. Он позволяет осуществлять регулирование скорости в широких пределах при сохранении постоянного наклона характеристик.
Способ экономичен:
уменьшение механической мощности на валу P2=wM достигается уменьшением
потребляемой от сети электрической мощности P1=UI+UвIв за счет уменьшения
напряжения U. Основной недостаток способа – большая мощность регулирования UI,
что требует применения соответствующих по мощности управляющих устройств.
Билет 27
Вопрос 1 Векторные диаграммы АМ в генераторе
Для построения векторной диаграммы необходимо рассмотреть соотношение, величины вторичного тока I2 при вращающемся с любым скольжением роторе:

В генераторном режиме s<0 и, согласно выше написанному выражению, по-прежнему величина I меняет знак, т.е. становится отрицательной и меняет свою фазу на 180. Физически это объясняется тем, что поле вращается относительно ротора по сравнению с двигательным режимом в обратную сторону, вследствие чего изменяются знаки ЭДС E2S и активной составляющей тока I2. В результате изменяется также знак вращающего момента, т.е. последний действует против направления вращения и становится тормозящим. На основании изложенного построена векторная диаграмма на рисунке 2.

Рисунок 2
Вопрос 2 Вращающиеся трансформаторы




Вопрос 3 Вентильные
двигатели
вентильные двигатели включают в себя три подсистемы:
Электронную.
Механическую.
Электрическую
В результате получается мехатронное устройство, которое позволяет сделать корпус
более компактным, избавиться от дополнительных деталей, лишних преобразователей,
а соответственно сделать весь привод механизма более надежным.
Устройство и работа
Вентильный электродвигатель представляет собой измененный вариант коллекторного
мотора постоянного тока. Мотор имеет индуктор, расположенный на роторе, обмотка
якоря находится на статоре. Электричество подается управляющими командами на
статорные обмотки, в зависимости от угла поворота ротора, который определяется
встроенными датчиками Холла.

Контроллер вентильного двигателя подключает обмотки статора так, что направление
магнитного поля статора всегда перпендикулярно направлению поля ротора.
Благодаря широтно-импульсной модуляции контроллер управляет током, который
проходит по обмоткам. В результате создается момент вращения ротора, который
регулируется.
Виды
Вентильные двигатели бывают постоянного и переменного тока. Кроме того, их
разделяют на виды по числу фаз:
Однофазные. Это наиболее простая конструкция вентильных двигателей с минимальным
числом связей между электронной системой и мотором. К недостаткам однофазных
двигателей относятся большие пульсации, невозможность пуска при некоторых
положениях ротора. Однофазные моторы широко используются в механизмах, где
необходима высокая скорость работы.
Двухфазные. Такие вентильные двигатели работают в механизмах, где обязательно
наличие связи обмотки и статора. К недостаткам можно отнести большой момент
вращения и сильные пульсации, способные привести к отрицательным последствиям.
Трехфазные. Эта дисковая конструкция мотора применяется для создания момента
вращения, не применяя для этого большое число фаз. Этот вид моторов используется
во многих отраслях промышленности, а также в бытовых условиях. Это наиболее
распространенная конструкция, по сравнению с другими. Трехфазные двигатели
вентильного типа, имеющие четное количество полюсов, стали хорошим вариантом для
устройств, где требуется сочетание небольшой скорости и высокой мощности.
Недостатками 3-фазных вентильных моторов является высокий уровень шума.
4-фазные. У таких двигателей значительно уменьшен момент вращения и пульсаций.
Используются они достаточно редко, так как они имеют высокую стоимость.
Вентильные двигатели применяются во многих областях производства, например, на
буровых установках, в системах охлаждения на химических заводах, на нефтяных
скважинах.
Билет 28
Вопрос 1 Формула Клосса

![]()
![]()
![]()
Механические характеристики
асинхронных двигателей могут быть выражены в виде n=f(M) или n=f(I). Однако
часто механические характеристики асинхронных двигателей выражаются в виде
зависимости M = f(S), где S — скольжение, S = (nc-n)/nc, где nс — синхронная
скорость.
Формула Клосса применяется при решении вопросов, связанных с электроприводом,
осуществляемым с помощью асинхронного двигателя. Пользуясь формулой Клосса можно
построить график механической характеристики по паспортным данным асинхронного
двигателя.

Вопрос 2 Индукционный фазорегулятор
Индукционные регуляторы напряжения и фазорегуляторы (фазовращатели) представляют
собой асинхронные машины с заторможенным фазным ротором, в которых с помощью
поворотного устройства можно изменять положение ротора относительно статора.
Намагничивающий ток соединенной с сетью обмотки создает магнитный поток, который
наводит ЭДС во вторичной обмотке. Фаза ЭДС меняется в зависимости от взаимного
положения осей первичной и вторичной обмоток.
В фазорегуляторах на нагрузку подается напряжение от вторичной обмотки,
неизменное по амплитуде и меняющееся по фазе в зависимости от угла поворота
ротора.
В индукционных регуляторах происходит суммирование первичного и вторичного
напряжений, при этом изменение фазы ЭДС вторичной обмотки, происходящее при
повороте ротора, вызывает изменение напряжения на нагрузке регулятора

Индукционные регуляторы по своей работе аналогичны автотрансформаторам, и их электромагнитная (расчетная) мощность тем меньше проходной (полезной), чем ниже пределы регулирования напряжения. Преимуществом регуляторов является плавное регулирование напряжения в широких пределах.
Вопрос 3
Асинхронные исполнительные двигатели
Асинхронные исполнительные двигатели (АИД) — это двухфазные АД с
короткозамкнутым ротором, которые преобразуют подводимое к ним напряжение
сигнала в механическое вращение вала.
Асинхронные исполнительные двигатели используют в системах автоматического
управления для управления и регулирования различных устройств.
Асинхронные исполнительные двигатели начинают действовать при подаче им
электрического сигнала, который они преобразуют в заданный угол поворота вала
или в его вращение. Снятие сигнала приводит к немедленному переходу ротора
исполнительного двигателя в неподвижное состояние без использования каких-либо
тормозных устройств. Работа таких двигателей протекает все время в условиях
переходных режимов, в результате чего скорость ротора зачастую при
кратковременном сигнале не достигает установившегося значения. Этому
способствуют также частые пуски, изменения направления вращения и остановки.
По конструктивному оформлению исполнительные двигатели представляют собой
асинхронные машины с двухфазной обмоткой статора, выполненной так, что магнитные
оси ее двух фаз сдвинуты в пространстве относительно друг друга не угол 90 эл.
град.
Одна из фаз обмотки статора является обмоткой возбуждении и имеет выводы к
зажимам с обозначениями C1 и С2. Другая, выполняющая роль обмотки управления,
имеет выводы, присоединенные к зажимам с обозначениями У1 и У2.
К обеим фазам обмотки статора подводят соответствующие переменные напряжения
одинаковой частоты. Так, цепь обмотки возбуждения присоединяют к питающей сети с
неизменным напряжением U, а в цепь обмотки управления подают сигнал в виде
напряжения управления Uу (рис. 1, а, б, в).

Асинхронные исполнительные двигатели изготавливают на номинальную мощность от долей до нескольких сотен ватт и предназначают для питания от источников переменного напряжения с частотой 50 Гц, а также повышенных частот до 1000 Гц и выше.
Билет 29
Вопрос 1 Линейные асинхронные двигатели
Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной
системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а
другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей
линейное перемещение подвижной части двигателя.
Многие типы линейных двигателей, такие как асинхронные, синхронные или
постоянного тока, повторяют по принципу своего действия
соответствующие двигатели вращательного движения, в то время как другие типы
линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют
практического исполнения как двигатели вращательного движения. Неподвижную часть
линейного электродвигателя, получающую электроэнергию из сети,
называют статором, или первичным элементом, а часть двигателя, получающую
энергию от статора, называют вторичным элементом или якорем (название «ротор» к
деталям линейного двигателя не применяется, так как слово «ротор» буквально
означает «вращающийся», а в линейном двигателе вращения нет).
Наибольшее распространение в транспорте и для больших линейных перемещений
получили асинхронные и синхронные линейные двигатели, но применяются также
линейные двигатели постоянного тока и линейные электромагнитные двигатели.
Последние чаще всего используются для получения небольших перемещений рабочих
органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Принцип работы
Если обмотки статора такого двигателя подключить к сети трёхфазного переменного
тока, то образуется магнитное поле, ось которого будет перемещаться вдоль
воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения
f и длине полюсного деления t: V = 2пf . Это перемещающееся вдоль зазора
магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под
действием которой по обмотке начнут протекать токи. Взаимодействие токов с
магнитным полем приведёт к появлению силы, действующей, по правилу Ленца, в
направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его
уже вторичным элементом — под действием этой силы начнёт двигаться. Как и в
обычном асинхронном двигателе, перемещение элемента происходит с
некоторым скольжением относительно поля S = (V - v)/V, где v — скорость движения
элемента. Номинальное скольжение линейного двигателя равно 2-6%.[1] Вторичный
элемент линейного двигателя не всегда снабжается обмоткой
Вопрос 2
Основные уравнения и векторная диаграмма приведённого трансформатора
Построение векторной диаграммы:
Построение векторной диаграммы удобнее начинать с вектора основного потока Ф. Отложим его по оси абсцисс. Вектор I10 опережает его на угол a. Далее строим векторы ЭДС Е1 и Е2‘, которые отстают от потока Ф на 90°. Для определения угла сдвига фаз между E2‘ и I2‘ следует знать характер нагрузки. Предположим, она активно-индуктивная. Тогда I2‘ отстает от E2′ на угол f2. Для того чтобы достроить векторную диаграмму, необходимо воспользоваться тремя основными уравнениями приведенного трансформатора.
Воспользуемся вторым основным уравнением и произведем сложение векторов:
![]()
Для этого к концу вектора E2‘ пристроим вектор — j I2‘ x2‘, а к его концу — вектор — I2‘ r2‘. Результирующим вектором U2‘ будет вектор, соединяющий начало координат с концом последнего вектора.
Теперь используем третье основное уравнение:
![]()
из которого видно, что вектор тока I1 состоит из геометрической суммы векторов I10 и-I2‘. Произведем это суммирование и достроим векторную диаграмму трансформатора. Теперь вернемся к первому основному уравнению:
![]()
Чтобы построить вектор — Е1 , нужно взять вектор +Е1 и направить его в противоположную сторону. Теперь можно складывать с ним и другие векторы: + j I1 x1 и I1 r1. Первый будет идти перпендикулярно току, а второй — параллельно ему. В результате получим суммарный вектор u1.
Построенная векторная диаграмма трансформатора имеет общий характер. По этой же методике можно осуществить ее построение как для различных режимов, так и для разных характеров нагрузки.

Вопрос 3 Векторные диаграммы АМ в режиме противовключения(молитесь)
В режиме противовключения ротор асинхронной машины вращается в на-правлении, противоположном направлению вращения магнитного поля. Теоре-тически соответствующий этому режиму диапазон скольжений составляет1 < s < ∞ , однако на практике скольжение обычно ограничено значениями
По сравнению с двигательным и
генераторным режимами работы в режиме противовключения сопротивление ![]() мало. Поэтому на
основании следующего равенства:
мало. Поэтому на
основании следующего равенства:
![]()
можно заключить, что ток
I2 и угол ![]() велики. Соответственно
этому первичный токI1 и угол сдвига фаз
велики. Соответственно
этому первичный токI1 и угол сдвига фаз ![]() так же велики. Это также
указывает на опасность режима в тепловом соотношении. Поэтому приU1=U1H
рассматриваемый режим допускается лишь кратковременно. На основании выше
изложенного построим векторную диаграмму режима противовключения.
так же велики. Это также
указывает на опасность режима в тепловом соотношении. Поэтому приU1=U1H
рассматриваемый режим допускается лишь кратковременно. На основании выше
изложенного построим векторную диаграмму режима противовключения.

////////////////////////////